DISPOSITIVO PARA DETERMINAR LA POSICIÓN DE UN VEHÍCULO DE TRANSPORTE SIN CONDUCTOR.
Dispositivo para la determinación de la posición (11) para un vehículo de transporte sin conductor (13),
mediante el cual se pueden determinar valores de medición de la posición que corresponden a una posición actual del dispositivo de determinación de la posición, caracterizado porque el dispositivo de determinación de la posición comprende un sensor de movimiento (19), mediante el cual se puede detectar, además de la determinación de los valores de medición de la posición, un movimiento del dispositivo de determinación de la posición, y se pueden determinar los correspondientes valores de medición del movimiento, presentando el dispositivo de determinación de la posición (11) una instalación de evaluación y control (21) mediante la cual se pueden evaluar los valores de medición de la posición y los valores de medición del movimiento para emitir las correspondientes señales de salida de posición para un control del accionamiento (25) del vehículo de transporte sin conductor (13), y estando realizada la instalación de evaluación y control (21) de tal modo para realizar la evaluación de los valores de medición de la posición y de los valores de medición del movimiento, que basándose en los valores de medición de movimiento que se hayan determinado se pueda distinguir al menos entre una fase de movimiento lento y una fase de movimiento rápido del vehículo de transporte sin conductor (13) que soporta el dispositivo de determinación de la posición, y se evalúen los valores de medición de la posición para las distintas fases de movimiento con una profundidad de integración diferente
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07079504.
Solicitante: SICK AG.
Nacionalidad solicitante: Alemania.
Dirección: ERWIN-SICK-STRASSE 1 79183 WALDKIRCH ALEMANIA.
Inventor/es: TORABI,BAHRAM,DR.
Fecha de Publicación: .
Fecha Solicitud PCT: 6 de Agosto de 2007.
Clasificación Internacional de Patentes:
- G05D1/02E14B
- G05D1/02E6S
- G05D1/02E6V
Clasificación PCT:
- G05D1/00 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S).
- G05D1/02 G05D […] › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
La invención se refiere a un dispositivo para determinar la posición de un vehículo de transporte sin conductor, mediante el cual se pueden determinar valores de medición de la posición que corresponden a una posición actual del dispositivo para la determinación de la posición por el vehículo de transporte sin conductor.
Un dispositivo de esta clase para determinar la posición encuentra su aplicación por ejemplo en almacenes de estantes elevados. Allí se desplazan vehículos de transporte sin conductor (FTF) en las calles entre las estanterías para almacenar y retirar del almacén objetos tales como palets, contenedores o similares, en puntos predeterminados. Con el fin de asegurar la carga y descarga sin problemas de los objetos es importante que el vehículo de transporte se posicione con precisión a lo largo de la calle entre estanterías. Para ello el dispositivo para la determinación de la posición, que va fijado al vehículo de transporte y que se desplaza junto con éste, determina un valor de medición de la posición actual, por ejemplo la distancia del vehículo de transporte a un objetivo. Un objetivo de esta clase, por ejemplo un retrorreflector, está situado en un extremo de la calle entre estanterías. El valor de medición de la posición se determina por ejemplo de acuerdo con el principio del tiempo de recorrido de la luz, por ejemplo mediante integración de carga en función del tiempo o por determinación de la posición de fase de una señal luminosa modulada.
Un valor de medición de la posición de esta clase lo puede tener en cuenta una instalación de control del accionamiento del vehículo de transporte sin conductor, en el correspondiente bucle de regulación. La problemática en este caso es que también unos movimientos involuntarios del vehículo, por ejemplo una oscilación del vehículo durante la descarga o carga de objetos, puede dar lugar en mediciones consecutivas a unos valores de medición de la posición diferentes, a pesar de que el vehículo en realidad no realiza ningún movimiento de desplazamiento. Ahora bien, estos diferentes valores de medición de la posición no deben dar lugar a movimientos activos de corrección del de la posición vehículo en la instalación de control del accionamiento, ya que con ello dejaría de estar asegurado que el vehículo se mantiene estable de la posición predeterminada.
Por este motivo puede estar previsto que el dispositivo de determinación de la posición
o la correspondiente instalación de evaluación y control distinga entre una fase de parada y una fase de movimiento del dispositivo de determinación de la posición o del vehículo de transporte sin conductor, donde se toleren en la fase de parada determinadas desviaciones entre valores de medición de la posición que hayan sido determinados de forma consecutiva. Sólo cuando en mediciones consecutivas se determinen valores de medición de la posición que se diferencien de modo suficientemente claro, se supone que el dispositivo de determinación de la posición o el vehículo de transporte se encuentran en la fase de movimiento. Sólo en esta fase de movimiento se emiten a la instalación de control del accionamiento del vehículo de transporte unas señales de salida de posición modificadas con respecto a las señales de salida de posición emitidas durante la fase de parada.
Ahora bien, una forma de proceder de esta clase también tiene como consecuencia que un movimiento efectivo de desplazamiento solamente se reconozca como tal de forma relativamente retardada. Este efecto puede dar lugar durante la transición entre la fase de parada y la fase de movimiento a una sobrerregulación en el bucle de regulación respectivo del control de accionamiento, que en las fases de arranque y parada del movimiento del vehículo se manifiesta como un indeseable funcionamiento “a sacudidas”. Este efecto tampoco se puede eliminar suficientemente mediante la aplicación de algoritmos de comparación y aproximación en la transición entre la fase de parada y la fase de movimiento.
En el documento W09529380 se describe un dispositivo para la determinación de la posición de un sistema de transporte autónomo sin conductor. Los valores de medición de la posición se determinan a partir de las correspondientes distancias a los retrorreflectores, de acuerdo con el principio de tiempo de recorrido de la luz. Los valores de posición se van promediando sucesivamente hasta que la precisión sea suficiente.
En el documento FR 2606176 se describe también un dispositivo para la determinación de la posición de un vehículo de transporte sin conductor. La frecuencia de las mediciones de posición depende de la velocidad del vehículo. Después de cada medición de la posición se determina el valor medio flotante de los valores de medición.
Un objetivo de la invención es mejorar las señales de salida de posición emitidas por el dispositivo de determinación de la posición para el control del accionamiento del vehículo de transporte sin conductor, de modo tal que incluso durante las fases de arranque y parada del movimiento del vehículo resulte posible efectuar un control de precisión del vehículo de transporte, y con ello se eviten saltos de variación de la corriente del motor del vehículo de transporte.
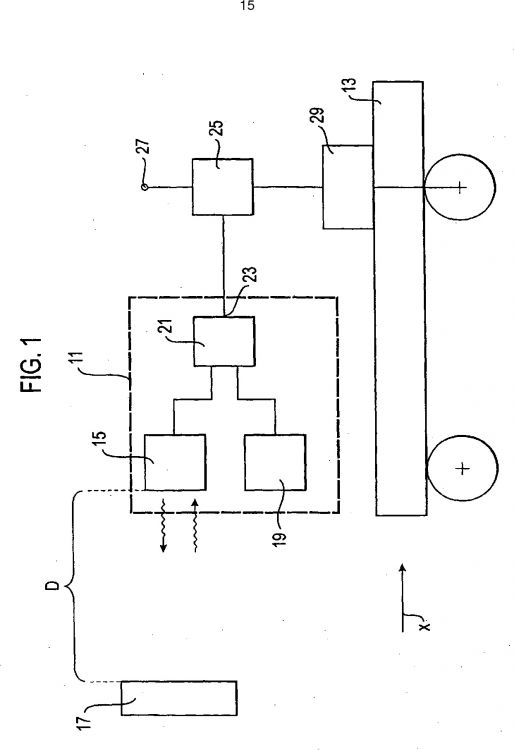
Este objetivo se resuelve por medio de un dispositivo de determinación de la posición que presenta las características de la reivindicación 1, y en particular por el hecho de que el dispositivo de determinación de la posición presenta un sensor de movimiento, mediante el cual se puede detectar, además de efectuar la determinación de los valores de medición de la posición, el movimiento del dispositivo de determinación de la posición, determinando los correspondientes valores de medición del movimiento, presentando para ello el dispositivo de determinación de la posición una instalación de evaluación y control mediante la cual se pueden evaluar los valores de medición de la posición y los valores de medición del movimiento con el fin de emitir las correspondientes señales de salida de posición para un control de accionamiento del vehículo de transporte sin conductor, y donde la instalación de evaluación y control está realizada de tal modo para efectuar la evaluación de los valores de medición de la posición y de los valores de medición del movimiento que basándose en los valores de medición de movimiento que se haya determinado se pueda distinguir por lo menos entre una fase de movimiento lento y una fase de movimiento rápido del vehículo de transporte sin conductor dotado del dispositivo de determinación de la posición, evaluándose los valores de medición de la posición mediante una profundidad de integración distinta para las diversas fases de movimiento.
Por lo tanto está previsto un sensor de movimiento que con independencia de realizar la determinación de un valor de medición de la posición (por ejemplo de la distancia absoluta hasta un objetivo), capta un movimiento del dispositivo de determinación de la posición o del correspondiente vehículo de transporte, es decir una velocidad o una aceleración. Al estar disponible adicionalmente un valor de medición del movimiento independiente, el dispositivo de determinación de la posición puede distinguir con especial seguridad y rapidez entre una fase de movimiento lento y una fase de movimiento rápido del vehículo de transporte sin conductor, para que, al determinar una fase de movimiento rápido, los valores de medición de la posición se integren con una menor profundidad de integración que en el caso de que se compruebe la existencia de una fase de movimiento lento.
Con relación a la invención se entiende por evaluación de los valores de medición de la posición con una profundidad de integración determinada, por ejemplo un promediado de los valores de medición de la posición que se hayan determinado (formación flotante del valor medio), pudiendo realizarse una diferente profundidad de integración, especialmente porque se promedia respecto a un número variable de los valores de medición de posición últimamente determinados.
Una profundidad de integración incrementada de esta clase al comprobar la existencia de una fase de movimiento lento (por ejemplo en el caso de marcha lentísima o parada del vehículo) provoca por una parte que los movimientos involuntarios del vehículo ya citados, por ejemplo una oscilación del mástil del vehículo, se puedan promediar con seguridad para no activar movimientos de compensación indeseados por parte del control del accionamiento del vehículo de transporte. Por...
Reivindicaciones:
1. Dispositivo para la determinación de la posición (11) para un vehículo de transporte sin conductor (13), mediante el cual se pueden determinar valores de medición de la posición que corresponden a una posición actual del dispositivo de determinación de la posición, caracterizado porque el dispositivo de determinación de la posición comprende un sensor de movimiento (19), mediante el cual se puede detectar, además de la determinación de los valores de medición de la posición, un movimiento del dispositivo de determinación de la posición, y se pueden determinar los correspondientes valores de medición del movimiento, presentando el dispositivo de determinación de la posición (11) una instalación de evaluación y control (21) mediante la cual se pueden evaluar los valores de medición de la posición y los valores de medición del movimiento para emitir las correspondientes señales de salida de posición para un control del accionamiento (25) del vehículo de transporte sin conductor (13), y estando realizada la instalación de evaluación y control (21) de tal modo para realizar la evaluación de los valores de medición de la posición y de los valores de medición del movimiento, que basándose en los valores de medición de movimiento que se hayan determinado se pueda distinguir al menos entre una fase de movimiento lento y una fase de movimiento rápido del vehículo de transporte sin conductor (13) que soporta el dispositivo de determinación de la posición, y se evalúen los valores de medición de la posición para las distintas fases de movimiento con una profundidad de integración diferente.
2. Dispositivo de determinación de la posición según la reivindicación 1,
caracterizado porque
la instalación de evaluación y control (21) está realizada de tal modo para evaluar los valores de medición de la posición y los valores de medición del movimiento, que los valores de medición de la posición correspondientes a la fase de movimiento lento del vehículo de transporte (13) se evalúan con una profundidad de integración superior que para la fase de movimiento rápido, pudiendo estar prevista para la fase de movimiento rápido incluso una profundidad de integración cero.
3. Dispositivo de determinación de la posición según una de las reivindicaciones anteriores,
caracterizado porque
para la evaluación de los valores de medición de la posición con distinta profundidad de integración se puede realizar mediante la instalación de evaluación y control (21) un promediado respectivo a lo largo de un número distinto de valores de medición de posición determinados.
4. Dispositivo de determinación de la posición según una de las reivindicaciones anteriores, caracterizado porque mediante la instalación de evaluación y control (21) se puede comprobar si los valores de medición de movimiento que se han determinado rebasan o no alcanzan un valor umbral predeterminado, con lo cual basándose en los resultados de esta comprobación se distingue entre la fase de movimiento lento y la fase de movimiento rápido del vehículo de transporte (13).
5. Dispositivo de determinación de la posición según una de las reivindicaciones anteriores, caracterizado porque las señales de salida de posición se pueden generar mediante la instalación de evaluación y control (21) -sirviéndose de los valores de medición de la posición, en particular mediante valores de medición de la posición promediados, o -sirviéndose de los valores de medición de movimiento, en particular de valores de medición de movimiento integrados de modo simple o doble, o -sirviéndose de una combinación de los valores de medición de la posición y de los valores de medición del movimiento.
6. Dispositivo de determinación de la posición según una de las reivindicaciones anteriores, caracterizado porque las señales de salida de posición se pueden determinar mediante la instalación de evaluación y control (21) sirviéndose de un modelo predeterminado del movimiento del vehículo de transporte sin conductor (13), que tenga en cuenta al menos los valores de medición de posición que se han determinado, los valores de medición de movimiento
que se han determinado y la masa del vehículo de transporte sin conductor.
7. Dispositivo de determinación de la posición según una de las reivindicaciones anteriores, caracterizado porque el sensor de movimiento (19) está realizado como sensor de velocidad o como una cámara orientada hacia abajo con su correspondiente instalación de tratamiento de la imagen.
8. Dispositivo de determinación de la posición según una de las reivindicaciones anteriores, caracterizado porque el sensor de movimiento (19) está realizado como un sensor de movimiento multidimensional, con el cual se pueda detectar al menos un movimiento del dispositivo de determinación de la posición que tenga lugar dentro de un plano horizontal.
9. Dispositivo de determinación de la posición según una de las reivindicaciones anteriores, caracterizado porque el sensor de movimiento (19) está integrado en el dispositivo de determinación de la posición (11).
10. Dispositivo de determinación de la posición según una de las reivindicaciones anteriores, caracterizado porque el dispositivo de determinación de la posición (11) está realizado como dispositivo optoelectrónico de medición de distancias, mediante la cual se puede determinar una distancia (D) a un objetivo (17), mediante la emisión y recepción de señales de luz, donde el valor de medición de la posición corresponde a la distancia (D) que se ha determinado.
11. Procedimiento para generar señales de salida de posición para un control de accionamiento (25) de un de transporte sin conductor (13), donde se determinan valores de medición de la posición que corresponden a una posición actual del vehículo de transporte sin conductor (13),
caracterizado porque además de la determinación de los valores de medición de la posición se determinan valores de medición del movimiento, que corresponden a un movimiento del vehículo de transporte sin conductor (13), 5 generándose las señales de salida de posición mediante valores de medición de la posición y los valores de medición del movimiento, donde basándose en los valores de medición de movimiento que se hayan determinado se distingue por lo menos entre una fase de movimiento lento y una fase de movimiento rápido del vehículo de transporte sin conductor (13), y 10 evaluándose los valores de medición de la posición con diferente profundidad de integración según la fase de movimiento que se haya comprobado. 12. Procedimiento según la reivindicación 11, caracterizado porque 15 los valores de medición de la posición correspondientes a la fase de movimiento lento del vehículo de transporte (13) se evalúan con una profundidad de integración superior que para la fase de movimiento rápido, pudiendo estar prevista también una profundidad de integración cero para la fase de movimiento rápido. 20 13. Procedimiento según una de las reivindicaciones 11 ó 12, caracterizado porque para la evaluación de los valores de medición de la posición se efectúa con diferente profundidad de integración un respectivo promediado a lo largo de un número variable de valores de medición de posición que se hayan determinado. 25 30 35
Patentes similares o relacionadas:
PROCEDIMIENTO Y APARATO PARA LA UTILIZACIÓN DE UN SISTEMA AUTOMÁTICO DE SEGUIMIENTO DEL CARRIL PARA MANTENER LA SEPARACIÓN LATERAL DEL VEHÍCULO, del 15 de Diciembre de 2011, de VOLVO TECHNOLOGY CORPORATION: Un procedimiento para pilotar un vehículo que comprende: - la detección de objetos en carriles adyacentes a un carril ocupado por el vehículo que utiliza un sistema de seguimiento […]
 PROCEDIMIENTO Y DISPOSITIVO PARA DIRIGIR UN VEHICULO SIN CONTACTO CON LA VIA, del 21 de Mayo de 2010, de MITSUBISHI HEAVY INDUSTRIES, LTD.: Un vehículo que no entra en contacto con un raíl que comprende:
ruedas ;
un cuerpo principal del vehículo soportado por dichas ruedas ; […]
PROCEDIMIENTO Y DISPOSITIVO PARA DIRIGIR UN VEHICULO SIN CONTACTO CON LA VIA, del 21 de Mayo de 2010, de MITSUBISHI HEAVY INDUSTRIES, LTD.: Un vehículo que no entra en contacto con un raíl que comprende:
ruedas ;
un cuerpo principal del vehículo soportado por dichas ruedas ; […]
 PROCEDIMIENTO Y MAQUINA PARA SOLDADURA AUTOMATICA PARA LA UNION DE BANDAS DE MATERIAL, del 13 de Abril de 2010, de LEISTER PROCESS TECHNOLOGIES: Procedimiento para la unión de bandas de material dispuestas con bordes solapantes , en el que se conduce una máquina para soldadura automática […]
PROCEDIMIENTO Y MAQUINA PARA SOLDADURA AUTOMATICA PARA LA UNION DE BANDAS DE MATERIAL, del 13 de Abril de 2010, de LEISTER PROCESS TECHNOLOGIES: Procedimiento para la unión de bandas de material dispuestas con bordes solapantes , en el que se conduce una máquina para soldadura automática […]
 SISTEMA DE LOCALIZACION POR VIDEO PARA TRANSPORTE, del 1 de Julio de 2007, de SATOR & FATA, S.L.: Sistema de localización por vídeo para transporte, que comprende al menos una o más cámaras de captura de imágenes en movimiento, instaladas […]
SISTEMA DE LOCALIZACION POR VIDEO PARA TRANSPORTE, del 1 de Julio de 2007, de SATOR & FATA, S.L.: Sistema de localización por vídeo para transporte, que comprende al menos una o más cámaras de captura de imágenes en movimiento, instaladas […]
 Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática, del 1 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática dentro de un entorno, en el que el aparato de limpieza limpia una superficie […]
DISPOSICIÓN DE MANDO, del 30 de Junio de 2020, de SEAT, S.A.: Una disposición de mando de un vehículo autónomo que modifica o ajusta una funcionalidad de conducción de un modo de conducción autónomo del […]
MÉTODO DE DETECCIÓN DE LÍNEAS DE TRANSMISIÓN DE ENERGÍA EN TIEMPO REAL CON VEHÍCULOS AÉREOS NO TRIPULADOS, del 25 de Junio de 2020, de PONTIFICIA UNIVERSIDAD JAVERIANA: La presente invención se refiere a un método para realizar la detección de líneas de transmisión de energía en una imagen capturada mediante una cámara […]