DISPOSITIVO DE BÚSQUEDA DE OBJETIVOS POR LASER.
Dispositivo de búsqueda de objetivos por láser dispuesto para recibir,
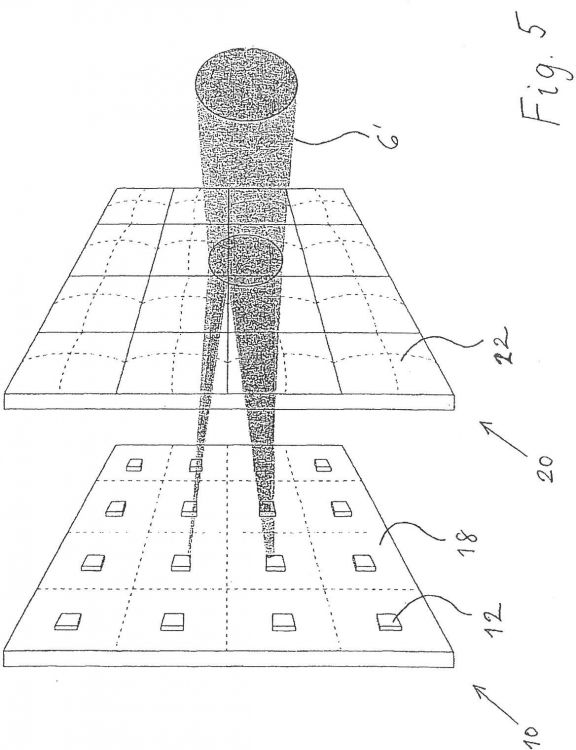
de un objeto, un haz de rayos láser reflejado, comprendiendo dicho dispositivo unos elementos de detección (12) dispuestos para detectar el haz de rayos láser reflejado (6), y un medio de procesamiento (30) dispuesto para determinar la radiación recibida sobre el respectivo elemento de detección (12) con el fin de determinar el origen del haz de rayos láser (6), en el que el medio de difracción (20; 70) está dispuesto con relación a los elementos de detección (12) y está configurado para difractar el haz de rayos láser difractado (6) en porciones (6a, 6b, 6c, 6d) antes de ser detectado por los elementos de detección (12), estando los elementos de detección dispuestos para detectar la porción respectiva, caracterizado porque el medio de difracción (20; 70) comprende unos elementos Kinoform (22; 72), constituyendo cada elemento Kinoform una superficie que presenta unas propiedades tales que el haz de rayos láser es difractado hacia un correspondiente elemento de detección y es proyectado en el elemento de detección con una forma deseada
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E05108961.
Solicitante: SAAB AB.
Nacionalidad solicitante: Suecia.
Dirección: ALBIHNS.ZACCO VALHALLAVAGEN 117 BOX 5581 114 85 STOCKHOLM SUECIA.
Inventor/es: LINDGREN, MIKAEL.
Fecha de Publicación: .
Fecha Solicitud PCT: 28 de Septiembre de 2005.
Fecha Concesión Europea: 15 de Septiembre de 2010.
Clasificación PCT:
- F41G7/22 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F41 ARMAS. › F41G APARATOS DE MIRA; PUNTERIA (aspectos ópticos G02B). › F41G 7/00 Sistemas de control de la dirección para misiles autopropulsados (control de vuelos B64C, G05D 1/00; proyectiles autopropulsados o misiles con sistemas de control únicamente instalados a bordo F42B 15/01; torpedos-cohetes F42B 17/00; torpedos marinos o minas marinas con medios de propulsión autónomos F42B 19/00; localización del blanco mediante ondas de radio u de otro tipo G01S; bajo el aspecto calculador G06). › Sistemas de guiado por mecanismos que responden a alguna clase de emanación del blanco (Homing).
- G01S3/786 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 3/00 Localizadores de dirección para la determinación de la dirección desde la que se reciben ondas infrasonoras, sonoras, ultrasonoras o electromagnéticas o emisiones de partículas, que no tienen contenido direccional significativo (establecimiento de la posición mediante la coordinación de una pluralidad de determinaciones de dirección o de líneas de posición G01S 5/00). › manteniéndose el estado deseado automáticamente.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
CAMPO TÉCNICO
La presente invención se refiere a un dispositivo de búsqueda de objetivos por láser de acuerdo con el preámbulo de la reivindicación 1. La presente invención se refiere también a un cuerpo capaz de volar, por ejemplo un misil, de acuerdo con el preámbulo de la reivindicación
17. La presente invención se refiere también a un sistema de acuerdo con el preámbulo de la reivindicación 18. La presente invención se refiere también a un procedimiento para la detección de un haz de rayos láser de acuerdo con el preámbulo de la reivindicación 19.
ANTECEDENTES
Un procedimiento habitual de proporcionar armas controladas con precisión consiste en apuntar a un objetivo por medio de un haz de rayos láser y permitir que un arma capaz de volar, como por ejemplo un misil, una bomba o elemento similar, se guíe por sí mismo hacia el punto del rayo láser. En consecuencia, se requiere un buscador de objetivos por láser, que sea capaz de distinguir el haz de rayos láser reflejado con relación al fondo. Mediante el buscador de objetivos por láser, se pretende conseguir un buscador de objetivos, cuya tarea sea detectar los haces de rayos láser detectados por un objetivo indicado en el terreno por medio de un señalador láser y determinar la radiación recibida sobre el respectivo elemento detector con el fin de determinar el origen del haz de rayos láser. El buscador de objetivos por láser también se designa a veces como sensor láser semiactivo o sensor SAL.
La tarea del buscador de objetivos consiste en informar dónde, dentro del campo de visión del buscador de objetivos, se encuentra el punto láser reflejado. Una forma habitual de conseguir esto consiste en utilizar un detector por cuadrantes. Un detector por cuadrantes se compone de cuatro elementos de detección separado situados borde con borde en un plano, siendo cada uno de los elementos de detección capaz de visualizar un cuadrante de un determinado campo visual. Mediante la medición y la comparación de la intensidad de la señal procedente de los cuatro cuadrantes, esto es, la cantidad de potencia óptica que termina en cada uno de los cuatro elementos, es posible determinar dónde está situado el punto de equilibrio de la reflexión láser y, de esta manera, en qué dirección enviar el misil. Cuando la intensidad de la señal es igualmente fuerte desde los cuatro elementos, la reflexión láser está en el centro del detector y el misil golpeará en mitad de la reflexión láser. Un problema del detector por cuadrantes es que la precisión deja bastante que desear, lo que podría suponer que el misil o proyectil similar no diera en el blanco.
Si se requiere una precisión mayor en la designación del objetivo, la reflexión puede enfocarse sobre un área más pequeña que la del detector por cuadrantes. De esta forma puede encontrarse el punto central con una mayor precisión, pero cuando la reflexión queda situada fuera del centro no es posible determinar lo lejos que se encuentra del centro. Esto supone una operación de guía la cual a veces es designada como “bang -bang”, esto es, los impactos se efectúan entre las posiciones terminales hasta que el haz reflejado está en la región central, punto en el que se obtiene un mejor control. Esto significa, no obstante, que hay que efectuar unos disparos de aproximación hasta que la reflexión esté en el centro. Si no se hace así, solo se conoce el cuadrante en el que el objetivo está situado.
Una alternativa más evolucionada consiste en utilizar una matriz de dos dimensiones de los elementos de detección para visualizar el entero campo de visión, por ejemplo, una matriz de detección que tenga unos elementos 4 x 4. La reflexión láser incidirá en uno o más de los elementos. Mediante la comparación de las intensidades de las señales puede calcularse la posición en la que la reflexión está situada. Una ventaja es que se consigue una determinación más precisa de la posición del objetivo dentro del campo de visión. También es posible crear múltiples “imágenes” tomadas una detrás de otra y utilizar unas rutinas de procesamiento de las imágenes para seguir y escoger entre objetivos candidatos.
Existen, sin embargo, algunas limitaciones en la utilización de una matriz de dos dimensiones que presenta más de cuatro elementos. En un detector por cuadrantes, se estira un alambre desde el borde periférico de un elemento hasta un amplificador correspondiente, y los alambres, en consecuencia, no afectan al haz de rayos láser entrante que inciden en los elementos de detección. Cada amplificador puede también ser situado próximo al alambre correspondiente. En el caso de la matriz de detección que presenta más elementos, por ejemplo, elementos 4 x 4, sin embargo, los alambres estirados desde los elementos internos afectarán al área de los elementos, esto es, al factor de llenado. Estos son generalmente estirados a lo largo de una trayectoria en la que los bordes de dos elementos adyacentes confluyen, afectando al factor de llenado y, en consecuencia, a la precisión. Los amplificadores conectados a los alambres estirados desde los elementos internos no requieren quedar situados en posición distante, lo que provoca una mayor capacitancia, lo que incrementa el ruido y, en consecuencia, afecta a la precisión.
El documento EP-A-1 248 120 divulga un dispositivo de búsqueda de objetivos por láser de acuerdo con el preámbulo de la reivindicación 1.
Los documentos US-A-6 003 810, US-A-5 973 649, US-B1-6 867 930, y US 2005/093757 A1 divulgan el estado general de la técnica.
OBJETIVOS DE LA INVENCIÓN
Un objetivo de la presente invención consiste en proporcionar un buscador de objetivos por láser que ofrezca una precisión mejorada.
Otro objetivo de la presente invención consiste en proporcionar un cuerpo capaz de volar, por ejemplo un misil, para impactar en un objetivo por medio de un haz de rayos láser reflejado con una precisión mejorada.
Un objetivo adicional de la presente invención consiste en proporcionar un sistema para impactar en un objetivo por medio de un haz de rayos láser reflejado con una precisión mejorada.
Otro objetivo más de la presente invención consiste en proporcionar un procedimiento para detectar un haz de rayos láser reflejado por un objeto sobre unos elementos de detección consiguiendo una mayor precisión.
SUMARIO DE LA INVENCIÓN
Estos y otros objetivos, evidentes a partir de la descripción posterior, se consiguen mediante un buscador de objetivos por láser, mediante un objeto capaz de volar, un sistema, y un procedimiento para la detección de un haz de rayos láser del tipo expuesto a modo de introducción y el cual, además, ofrezca las características distintivas definidas en la cláusula caracterizadora de las reivindicaciones adjuntas 1, 16. Formas de realización preferentes del dispositivo de búsqueda de objetivos por láser inventivo, y del procedimiento para la detección de un haz por rayos láser se definen en las subreivindicaciones adjuntas 2 a 15, 17 a 18.
Un objetivo se consigue mediante un buscador de objetivos por láser que comprende un medio de difracción dispuesto en relación con los elementos de detección y configurado para disfractar el haz de rayos láser reflejado en porciones antes de ser detectado por los elementos de detección, estando los elementos de detección dispuestos para detectar la porción respectiva. Una ventaja es que los elementos de detección pueden estar separados unos de otros habilitando un espacio entre ellos, lo que se traduce en el hecho de que los alambres pueden ser estirados desde cada elemento detector sin afectar a la superficie de detección incrementando de esta manera el factor de llenado y, en consecuencia, la precisión. Tampoco se necesitan largos alambres para cada elemento de detección, lo cual reduce también la capacitancia y, en consecuencia, incrementa la relación de señal a ruido y, por tanto, la precisión.
De modo preferente, las porciones individuales respectivas del haz de rayos láser están dispuestas de forma que queden dirigidas hacia un correspondiente elemento de detección individual respectivo. Una ventaja es que la precisión aumenta, dado que no se produce ninguna pérdida de la radiación entre los detectores.
De modo preferente, el medio de difracción comprende un medio de enfoque configurado de tal manera que las respectivas porciones difractadas del haz de rayos láser sean enfocadas antes...
Reivindicaciones:
1. Dispositivo de búsqueda de objetivos por láser dispuesto para recibir, de un objeto, un haz de rayos láser reflejado, comprendiendo dicho dispositivo unos elementos de detección (12) dispuestos para detectar el haz de rayos láser reflejado (6), y un medio de procesamiento (30) dispuesto para determinar la radiación recibida sobre el respectivo elemento de detección (12) con el fin de determinar el origen del haz de rayos láser (6), en el que el medio de difracción (20; 70) está dispuesto con relación a los elementos de detección (12) y está configurado para difractar el haz de rayos láser difractado (6) en porciones (6a, 6b, 6c, 6d) antes de ser detectado por los elementos de detección (12), estando los elementos de detección dispuestos para detectar la porción respectiva, caracterizado porque el medio de difracción (20; 70) comprende unos elementos Kinoform (22; 72), constituyendo cada elemento Kinoform una superficie que presenta unas propiedades tales que el haz de rayos láser es difractado hacia un correspondiente elemento de detección y es proyectado en el elemento de detección con una forma deseada.
2. Un dispositivo de acuerdo con la reivindicación 1, en el que las porciones individuales respectivas del haz de rayos láser están dispuestas para ser dirigidas hacia un correspondiente elemento de detección individual respectivo.
3. Un dispositivo de acuerdo con las reivindicaciones 1 o 2, en el que el medio de difracción (20; 70) comprende un medio de enfoque configurado de tal manera que las respectivas porciones difractadas del haz de rayos láser son enfocadas antes de ser detectadas por los elementos de detección (12).
4. Un dispositivo de acuerdo con cualquier reivindicación precedente, en el que los elementos de detección (12) constituyen una matriz de detección (10).
5. Un dispositivo de acuerdo con la reivindicación 1, en el que los elementos Kinoform (22; 72) constituyen una matriz de difracción.
6. Un dispositivo de acuerdo con la reivindicación 5, en el que la matriz de difracción está dispuesta sustancialmente en paralelo con la matriz de detección (10).
7. Un dispositivo de acuerdo con cualquier reivindicación precedente, en el que los elementos de detección (12) están fijados, de modo preferente, pegados, a un miembro de soporte separado (18).
8. Un dispositivo de acuerdo con la reivindicación 7, que comprende también un medio de amplificación (14) conectado a cada elemento de detección (12) estando el medio de amplificación conectado al medio de procesamiento (30).
9. Un dispositivo de acuerdo con la reivindicación 8, en el que el medio de amplificación comprende un circuito de amplificación fijado a, de modo preferente integrado en, el miembro de soporte (18).
10. Un dispositivo de acuerdo con cualquier reivindicación precedente, que comprende también un miembro difractivo (40; 45) dispuesto para enfocar el haz de rayos láser reflejado antes de alcanzar el medio de difracción.
11. Un dispositivo de acuerdo con la reivindicación 10, en el que el miembro difractivo comprende un miembro de lente (40).
12. Un dispositivo de acuerdo con la reivindicación 10, en el que el miembro difractivo comprende un miembro Kinoform (45).
13. Un dispositivo de acuerdo con cualquier reivindicación precedente, en el que cada elemento de detección tiene el tamaño preciso para que la superficie de detección sea ligeramente mayor que el haz de rayos láser proyectado.
14. Un cuerpo capaz de volar, por ejemplo un misil, una granada, un robot, o similar, para impactar en un objetivo por medio de un haz de rayos láser reflejado por dicho objetivo, comprendiendo el dispositivo de búsqueda de objetivos por láser de acuerdo con una cualquiera de las reivindicaciones 1 a 13, estando el dispositivo dispuesto para guiar el cuerpo hacia el objetivo por medio de dicho haz de rayos láser.
15. Un sistema para impactar en un objetivo por medio de un haz de rayos láser reflejado por dicho objetivo, comprendiendo un señalador por láser para señalar
dicho objetivo por medio de un haz de rayos láser, y un cuerpo capaz de volar, de acuerdo con la reivindicación 14.
16. Un procedimiento para la detección de un haz de rayos láser reflejado por un objeto 5 sobre unos elementos de detección, que comprende las etapas de:
- la recepción del haz de rayos láser reflejado (110) por el objeto; -la difracción del haz de rayos láser reflejado en porciones (130A); -la detección de la potencia óptica de las porciones del haz de rayos láser difractado sobre dichos elementos de detección (140); -la transferencia de unas señales correspondientes a dicha potencia óptica desde los elementos de detección (150) para su procesamiento; y -el procesamiento de las señales transferidas (160) para determinar la radiación recibida sobre el respectivo elemento de detección con el fin de determinar el origen del haz de rayos láser, caracterizado porque la etapa de la difracción del haz de rayos láser reflejado en porciones comprende la difracción, por medio de unos elementos Kinoform, para cada elemento Kinoform, del haz de rayos láser hacia un correspondiente elemento de detección y la proyección, para cada elemento Kinoform, del haz de rayos láser en el elemento de detección con una forma deseada.
17. Un procedimiento de acuerdo con la reivindicación 16, caracterizado por la etapa de la dirección de las respectivas porciones individuales del haz de rayos láser hacia un correspondiente elemento de detección individual respectivo.
18. Un procedimiento de acuerdo con las reivindicaciones 16 o 17, caracterizado por la etapa del enfoque del haz de rayos láser antes de difractarlo (120).
Patentes similares o relacionadas:
Procedimiento de pilotaje de la orientación de un seguidor solar basado en unos modelos cartográficos, del 12 de Febrero de 2020, de NEXTracker INC: Procedimiento de pilotaje de la orientación de un seguidor solar de eje único orientable alrededor de un eje de rotación (A), cumpliendo dicho procedimiento […]
Procedimiento y dispositivo para controlar la posición de una plataforma pivotable alrededor de tres ejes provista de un dispositivo de seguimiento de objetivos, del 20 de Noviembre de 2019, de MBDA Deutschland GmbH: Procedimiento para controlar la posición de una plataforma sensible a la vibración provista de un dispositivo de seguimiento de objetivos, pivotable […]
Procedimiento para determinar datos de posición de un objeto objetivo en un sistema de referencia, del 11 de Septiembre de 2019, de MBDA Deutschland GmbH: Procedimiento para determinar los datos de posición de un objeto objetivo (Z) en un sistema de referencia desde una posición de observación separada […]
Estructura solar de aeronave adaptativa, del 17 de Abril de 2019, de Sunlight Aerospace Inc: Estructura solar de aeronave adaptable, que comprende: un cuerpo expandible […]
SISTEMA DE CAPTACIÓN SOLAR MEDIANTE TÉCNICAS DE VISIÓN ARTIFICIAL, del 28 de Septiembre de 2018, de CENTRO DE INVESTIGACIONES ENERGETICAS, MEDIOAMBIENTALES Y TECNOLOGICAS (CIEMAT): La presente invención da a conocer un método y un colector solar del tipo que comprende un con centrador para captar energía solar y transmitida […]
Sensor solar y Método para detectar la posición del sol respecto al eje transversal del mismo., del 6 de Julio de 2018, de UNIVERSIDAD DE CADIZ: Sensor solar y método para detectar la posición del sol respecto al eje transversal del mismo. La invención consiste en un sensor solar con una matriz […]
Método para regular la alineación de un heliostato sobre un receptor, dispositivo de heliostato y central de energía solar, del 16 de Agosto de 2017, de DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Método para regular la alineación de un heliostato sobre un receptor , en donde el heliostato comprende un equipamiento de espejo con una superficie de […]
Estructura solar de aeronave adaptativa, del 21 de Junio de 2017, de Sunlight Photonics Inc: Estructura solar de aeronave flexible, que comprende: un sistema solar fotovoltaico […]