Controlador de robot y sistema de robot.
Un aparato de control de robot adaptado para controlar una pluralidad de robots (R1,
R2, R3, R4) de manera simultánea basado en un programa de robot, dicho aparato de control de robot comprende:
una parte de registro de unidad (1) adaptada para combinar arbitrariamente una o más de la pluralidad de robots una parte de registro de unidad (1) para combinar arbitrariamente una o más de la pluralidad de robots (R1, R2, R3, R4) para definir una unidad,
una pare de registro de tarea (2) adaptada para asignar una tarea para cada una de las unidades, una parte de procesamiento de lenguaje de gráficos (3) adaptado para formar el programa de robot como un programa de gráficos para cada una de las tareas, y una parte de conversión de programa (4) adaptada para convertir el programa de gráficos en el programa de robot, en el que dicha parte de conversión de programa (4) convierte dicho programa de robot inversamente en el programa de gráficos para indicar visualmente la ejecución del programa de robot en un miembro de pantalla (12) de un aparato de instrucción (11), y
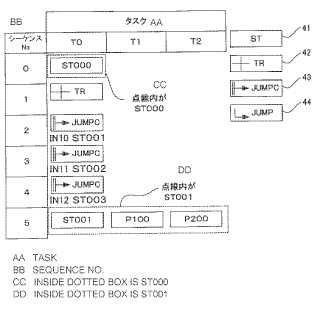
dicho programa de gráficos visualiza el programa de robot como una matriz de columnas, correspondiendo cada una a una de dichas tareas asignadas a dichas unidades, y filas, correspondiendo cada una a un número de secuencia de procesamiento ejecutado secuencialmente en el tiempo, en el que una de las filas corresponde a un número de secuencia de un procesamiento ejecutado para cada una de las tareas en paralelo.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/JP2005/020213.
Solicitante: KABUSHIKI KAISHA YASKAWA DENKI.
Nacionalidad solicitante: Japón.
Dirección: 2-1, KUROSAKI-SHIROISHI, YAHATANISHI-KU KITAKYUSHU-SHI, FUKUOKA 806-0004 JAPON.
Inventor/es: MATSUO, KENJI, ONO, Saburoc/o.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J9/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
PDF original: ES-2380625_T3.pdf
Fragmento de la descripción:
Controlador de robot y sistema de robot
La presente invención se refiere a un aparato de control de robot y a un sistema de robot del mismo para controlar una pluralidad de robots.
En el artículo "Approach to cooperative assembly task planning for multiple manipulators", Computer Supported Cooperative Work in Design, Proceedings of the International Conference on Xiamen, China, mayo 2004, Vol. 1, páginas 202-206 por Hanyang Dong et al. una planificación de tareas se basa en una herramienta gráfica, llamada "Diagrama de Precedencia de Montaje Jerárquico" (HAPG) . Las operaciones de montaje detalladas se asignan a los robots disponibles. La ejecución puede visualizarse en la forma de un "diagrama de Gantt".
Además, el artículo "Cooperative Transport by Multiple Mobile Robots in Unknown Static Environments Associated With Real-time Task Assignment", IEEE Transactions on Robotics Automation, Vol. 18, Nº 5, 2002 por Natsuki Miyata et al. describe una arquitectura para la asignación de tareas en tiempo real para un sistema de múltiples robots para realizar tareas de transporte de forma cooperativa. En particular, además del transporte real, las tareas también incluyen la búsqueda de la trayectoria de transporte, con el fin de detectar y eliminar obstáculos, si fuera necesario. Los esquemas de asignación de tareas se visualizan gráficamente y el rendimiento del sistema se evalúa mediante simulación y experimentación.
Un entorno de programación para sistemas robóticos, llamado ORCCAD se describe en el artículo "the ORCCAD Architecture", International Journal of Robotics Research, Sage Science Press, Thousand Oaks, Estados Unidos, Vol. 17, Nº 4, páginas 338-359, 1998, por J-J. Borrelly et al. El entorno proporciona herramientas basadas en gráficos para programar acciones de robot en una arquitectura compleja. Las acciones de robot básicas se combinan en "tareas de robot", mientras que las tareas de robot se componen de manera más lógica en "procedimientos de robot" más complejos.
Como un programa de una técnica anterior de un aparato de control de robot para controlar una pluralidad de robots, existe un programa de secuencia mostrado en la Figura 7. En un primer programa de secuencia mostrado en la Figura 7, se describe una columna vertical del mismo con etapas de la etapa 1 a las etapas 2, 3…, se describe una columna horizontal del mismo con un elemento R1, elemento R2 y elemento R3 para controlar respectivamente robots RB1, RB2 y RB3. Las mismas filas son las mismas etapas y se procesan en paralelo. Un procesamiento en cada etapa se inicia después de finalizar de procesar una etapa anterior de cada etapa.
Cada elemento R comprende una columna F, columna de operación, columna de pieza, columna de herramienta, columna de localización. La columna F representa la presencia/ausencia de una continuación de proceso de una etapa precedente, y cuando la columna F se describe con una marca de flecha, como en, por ejemplo, la columna F de la etapa 2 del elemento R3, muestra que un proceso de la etapa 1 una etapa antes de la misma se continúa también para procesar en la etapa 2 (referencia a la Referencia de Patente 1) .
Además, se dará una explicación de un aparato de una técnica anterior para visualizar una pluralidad de programas de operación de robot en referencia a la Figura 8 hasta la Figura 10. En la Figura 8, se representan una región de visualización de una pantalla de visualización de una parte de visualización de una operación de programa/estado se divide en una región de visualización de tareas maestra 71, una subregión 72 de visualización de tarea 1, una subregión 73 de visualización de tarea 2, una región 74 de estado de visualización y una pluralidad de programas de operación accionados en sincronía de acuerdo con un diagrama de flujo de la Figura 9 mientras operan de manera cooperativa los programas de operación mostrados por la Figura 10. La Figura 10 muestra el diagrama de flujo de la Figura 9 en el lado izquierdo, muestra una pantalla de visualización de estado mediante programas de operación respectivos de robots de la Figura 8 en el lado derecho y muestra el comportamiento del control de la pantalla de la Figura 8 mediante el diagrama de flujo de la Figura 9 (referencia a la Referencia de Patente 2) .
Referencia de Patente 1: JP-A-6-67709 (página 3, fila derecha, línea 46 hasta página 4, fila izquierda, línea 17, Figura 2) Referencia de Patente 2: JP-A-11-48178 (página 3, fila derecha, línea 33 hasta página 4, fila izquierda, línea 3, Figura 2, Figura 3, Figura 6)
La invención descrita en la Referencia de Patente 1 es eficaz en que cuando los procesamientos en paralelo se ejecutan para los robots respectivos, pueden formarse programas para los robots respectivos. Sin embargo, un operario no puede determinar exhaustivamente si los procesamientos se han ejecutado en paralelo mediante una unidad de operación determinada o los procesamientos se llevan a cabo en sincronía.
Por ejemplo, en una operación de ejecución de soldadura para un trabajo, la operación está constituida por una pluralidad de etapas de operación de una etapa de establecimiento de un trabajo a una plantilla, una etapa de ejecución de soldadura, una etapa de revisión del trabajo, una etapa de ejecución de soldadura, una etapa de llevar a cabo el trabajo a la siguiente etapa y similares.
La invención descrita en la Referencia de Patente 1 plantea un problema de que el operario puede determinar simplemente visualizando programas con respecto a esto en relación con las etapas de operación, qué etapa de operación se está ejecutando actualmente, o bajo qué condición, la ejecución transita de la etapa de operación a la siguiente etapa o similares.
Por otro lado, de acuerdo con la invención descrita en la Referencia de Patente 2, el programa de operación del robot se visualiza en la pantalla de visualización como es, lo que plantea el problema de que el significado de un contenido de pantalla es difícil de entender por otro que no sea un operario experto.
La invención es para la resolución de los problemas proporcionados en las técnicas anteriores y es un objeto de la misma proporcionar un sistema de robot capaz de determinar sencillamente qué etapa de operación se ejecuta actualmente en relación con las etapas de operación, o bajo qué ejecución de condición transita la etapa de operación a la siguiente etapa, adicionalmente, capaz de entender el significado de un contenido de pantalla incluso por otro que no sea un experto.
Esto se consigue mediante las características de las reivindicaciones independientes. Las características y ventajas adicionales de la presente invención son la materia objeto de las reivindicaciones dependientes.
De acuerdo con la reivindicación 2, se proporciona el aparato de control de robot de acuerdo con la reivindicación 1, en el que la parte de procesamiento de lenguaje de gráficos representa un número de secuencia ejecutado secuencialmente en el tiempo en cada fila del miembro de pantalla de un aparato de instrucción, y visualiza el programa de robot ejecutado en la tarea de cada columna.
De acuerdo con la reivindicación 3, se proporciona el aparato de control de robot de acuerdo con la reivindicación 2, en el que la parte de procesamiento de lenguaje de gráficos hace que la ejecución transite a la siguiente etapa después de terminar de ejecutar una etapa en curso.
De acuerdo con la reivindicación 4, se proporciona el aparato de control de robot de acuerdo con la reivindicación 2 ó 3, en el que la parte de procesamiento de lenguaje de gráficos hace que la ejecución se transmita a una etapa predeterminada basándose en una señal de entrada externa del aparato de control de robot después de terminar de ejecutar la etapa en curso.
De acuerdo con la reivindicación 5, se proporciona un sistema de robot que incluye:
una pluralidad de piezas de robots, un aparato de control de robot de acuerdo con cualquiera de las reivindicaciones El sistema de robot de la invención consigue un efecto significativo de la capacidad de formar fácilmente una secuencia de operación de una pluralidad de robots sin estar acostumbrado a un lenguaje especial, además, en la operación de ejecución del robot, mediante la visualización gráfica del estado de ejecución, un operario puede determinar exhaustivamente una situación operacional en curso.
[Figura 1]
La Figura 1 es un diagrama de... [Seguir leyendo]
Reivindicaciones:
1. Un aparato de control de robot adaptado para controlar una pluralidad de robots (R1, R2, R3, R4) de manera simultánea basado en un programa de robot, dicho aparato de control de robot comprende:
una parte de registro de unidad (1) adaptada para combinar arbitrariamente una o más de la pluralidad de robots una parte de registro de unidad (1) para combinar arbitrariamente una o más de la pluralidad de robots (R1, R2, R3, R4) para definir una unidad, una pare de registro de tarea (2) adaptada para asignar una tarea para cada una de las unidades, una parte de procesamiento de lenguaje de gráficos (3) adaptado para formar el programa de robot como un programa de gráficos para cada una de las tareas, y una parte de conversión de programa (4) adaptada para convertir el programa de gráficos en el programa de robot, en el que dicha parte de conversión de programa (4) convierte dicho programa de robot inversamente en el programa de gráficos para indicar visualmente la ejecución del programa de robot en un miembro de pantalla (12) de un aparato de instrucción (11) , y dicho programa de gráficos visualiza el programa de robot como una matriz de columnas, correspondiendo cada una a una de dichas tareas asignadas a dichas unidades, y filas, correspondiendo cada una a un número de secuencia de procesamiento ejecutado secuencialmente en el tiempo, en el que una de las filas corresponde a un número de secuencia de un procesamiento ejecutado para cada una de las tareas en paralelo.
2. El aparato de control de robot de acuerdo con la reivindicación 1, en el que dicho programa de gráficos se visualiza durante la ejecución del programa de robot de tal manera que una manera de visualización se cambia por una parte de programa que está ejecutada actualmente.
3. El aparato de control de robot de acuerdo con la reivindicación 1 ó 2, en el que la parte de procesamiento de lenguaje de gráficos (3) hace que la ejecución transite a una etapa siguiente después de finalizar de ejecutar la etapa en curso.
4. El aparato de control de robot de acuerdo con cualquiera de las reivindicaciones 1 a 3, en el que la parte de procesamiento de lenguaje de gráficos (3) hace que la ejecución transite a una etapa predeterminada basándose en una señal de entrada externa del aparato de control de robot después de terminar de ejecutar la etapa en curso.
5. Un sistema de robot que comprende:
una pluralidad de robots (R1, R2, R3, R4) , un aparato de control de robot (10) de acuerdo con una cualquiera de las reivindicaciones 1 a 4 para controlar de manera simultánea la pluralidad de robots (R1, R2, R3, R4) basado en un programa de robot, y un aparato de instrucción de robot (11) conectado al aparato de control de robot (10) y que incluye un miembro de pantalla (12) y un miembro de edición del programa de robot.
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Sistema y método para realizar operaciones en artefactos con cápsulas robóticas replegables, del 24 de Junio de 2020, de ABB SCHWEIZ AG: Un método para operar al menos una cápsula robótica automatizada replegable en un espacio de trabajo donde se coloca una pieza de trabajo , la […]
Aparato de perforación y método, del 13 de Mayo de 2020, de BAE SYSTEMS PLC: Aparato de perforación para avellanar un orificio perforado previamente formado en una parte , estando el orificio perforado previamente […]
Adaptador de enchufe, instrumento de ajuste y robot asociado, del 22 de Abril de 2020, de KUKA Deutschland GmbH: Adaptador de enchufe, que presenta: - una rosca , que está configurada para atornillar el adaptador de enchufe a un instrumento de ajuste , - un dispositivo […]
Método y disposición para generar y probar trayectorias de transporte de piezas de trabajo candidatas en una prensa con varias estaciones, del 22 de Abril de 2020, de GUDEL GROUP AG: Método para la generar y probar trayectorias de transporte de piezas de trabajo candidatas en una prensa de estación múltiple, comprendiendo los […]
Pasador de cizallamiento para calibración de robots, del 1 de Abril de 2020, de ABB SCHWEIZ AG: Un pasador de cizallamiento para calibrar un robot industrial y configurado de modo que se monte en un soporte del pasador de calibración en el robot […]
Procedimiento para monitorizar una línea de suministro de un robot industrial y un dispositivo de control, del 25 de Marzo de 2020, de KUKA Deutschland GmbH: Procedimiento para monitorizar una línea de suministro de un robot industrial , que tiene una o más líneas guiadas en un conducto protector , para detectar […]
CONTROLADOR PARA ROBOTS, del 19 de Marzo de 2020, de ERLE ROBOTICS, S.L: En este documento se describe detalladamente y con la inclusión de un ejemplo de implementación de la correspondiente invención, así como de las correspondientes figuras […]