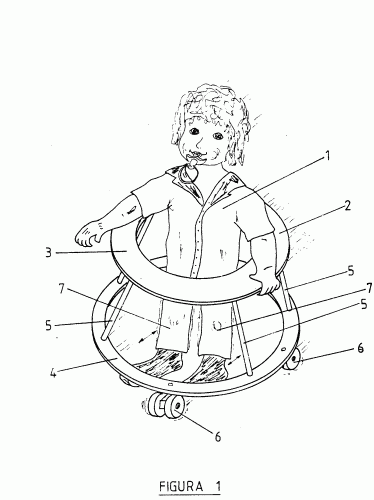
CONJUNTO MUÑECO Y TACATA PARA ENSEÑANZA A ANDAR.
1. CONJUNTO MU ECO Y TACATA PARA ENSE ANZA A ANDAR, CARACTERIZADO POR LA INCORPORACION EN EL INTERIOR DEL TACATA DE UN MU ECO QUE A TRAVES DEL MOVIMIENTO ACOMPASADO DE SUS PIERNAS LOGRA LA IMPULSION DE TODO EL CONJUNTO,
DESPLAZANDOLO BIEN POR APOYO DEL CUERPO O DE LAS MANOS DEL CITADO MU ECO EN SU IMPULSION DEL TACATA.
Tipo: Resumen de patente/invención.
Solicitante: BERENGUER HERMANOS, S.A..
Nacionalidad solicitante: España.
Provincia: ALICANTE.
Inventor/es: BERENGUER FUENTES, VICENTE.
Fecha de Solicitud: 19 de Noviembre de 1987.
Fecha de Publicación: .
Fecha de Concesión: 20 de Diciembre de 1988.
Clasificación Internacional de Patentes:
- A63H11/18 NECESIDADES CORRIENTES DE LA VIDA. › A63 DEPORTES; JUEGOS; DISTRACCIONES. › A63H JUGUETES, p. ej. TROMPOS, MUÑECOS, AROS O JUEGOS DE CONSTRUCCION. › A63H 11/00 Figuras que se desplazan por sí mismas. › Figuras que realizan un movimiento natural de marcha.
Patentes similares o relacionadas:
 Robot humanoide jugador, método y sistema de utilización de dicho robot, del 4 de Diciembre de 2015, de Aldebaran Robotics: Robot humanoide que comprende al menos un procesador configurado para que el robot se desplace sobre unos miembros inferiores, efectúe movimientos de miembros […]
Robot humanoide jugador, método y sistema de utilización de dicho robot, del 4 de Diciembre de 2015, de Aldebaran Robotics: Robot humanoide que comprende al menos un procesador configurado para que el robot se desplace sobre unos miembros inferiores, efectúe movimientos de miembros […]
ACTUADOR PARA MOVIMIENTO DE ARRANQUE -PARADA, PRINCIPALMENTE EN ROBOTSCAMINANTES, Y EL PROCEDIMIENTO PARA SU CONTROL., del 16 de Marzo de 2005, de CONSEJO SUP. INVESTIG. CIENTIFICAS: Actuador para movimientos de arranque-parada, principalmente en robots caminantes, y el procedimiento para su control. Actuador para movimientos […]
MECANISMO PARA MOVER LAS EXTREMIDADES INFERIORES DE UNA FIGURA DE JUGUETE., del 16 de Junio de 2004, de GIOCHI PREZIOSI LUSSEMBURGO S.A.: Mecanismo para mover las extremidades inferiores conectadas al cuerpo de una figura de juguete con el fin de permitir que dicha figura de juguete […]
CONJUNTO DE MOVIMIENTO, PARTICULARMENTE PARA LAS PIERNAS DE UNA MUÑECA., del 1 de Mayo de 2004, de GIOCHI PREZIOSI S.P.A.: UN ENSAMBLAJE DE MOVIMIENTO, EN PARTICULAR PARA LAS PIERNAS DE UNA MUÑECA INCLUYE UNA TRANSMISION ACCIONADA POR ENGRANAJE, EN LA QUE LA RUEDA EXTREMA, ACOPLADA […]
ACTUADOR PARA LAS PIERNAS DE UN ROBOT CAMINANTE., del 16 de Octubre de 2003, de CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS: Actuador para las piernas de un robot caminante. El actuador para las piernas de un robot caminante, en su mayor parte robots bípedos, con un elemento […]
MODELO MECANICO DE UN ANIMAL, del 16 de Enero de 2002, de STADLBAUER, ANDREAS: LA INVENCION SE REFIERE A UN MODELO MECANICO DE UN ANIMAL, ESPECIALMENTE UN PERRO DE JUGUETE CON PATAS DELANTERAS Y PATAS TRASERAS QUE SE ENCUENTRAN DISPUESTAS […]
MECANISMO DE MOVIMIENTO, EN PARTICULAR, PARA JUGUETES., del , de NUOVA CEPPI RATTI S.P.A.: UN MECANISMO DE MOVIMIENTO PARA JUGUETES, PARTICULARMENTE PARA MOVER LAS PIERNAS DE UNA MUÑECA O UN TITERE CON UN MOVIMIENTO ANGULAR ALTERNO SIMILAR AL PASEO, […]
MUÑECO ANDADOR PERFECCIONADO., del 1 de Marzo de 1999, de MIJER, S.A.: MUÑECO ANDADOR PERFECCIONADO. SE PROPORCIONA UN MUÑECO CON PIERNAS DE MUÑECO RIGIDAS IMPULSADAS CON UN MOVIMIENTO DE VAIVEN, UN DISPOSITIVO […]