Procedimiento de ablación de una superficie en tres dimensiones gracias a un dispositivo de ablación láser y gracias al uso de una etapa de calibrado; dispositivo de realización de dicho procedimiento.
Procedimiento de ablación de una superficie (1) en tres dimensiones gracias a un dispositivo (2) de ablación,
comprendiendo el dispositivo (2):
- una fuente (3) láser para generar un haz (4) láser pulsado;
- un módulo (6) óptico para focalizar y dirigir, según unos ejes que definen un plano (X, Y) y según una profundidad (z), el haz (4) sobre la superficie (1) que va a ser ablacionada,
- por lo menos una cámara (10) de observación de la superficie que va a ser ablacionada; y
- una unidad de control (9) conectada al módulo (6) y a la cámara (10);
estando el procedimiento caracterizado 15 por que comprende
- una etapa (E1) de calibración del dispositivo (2) según la cual
- el módulo (6) ilumina (S1, S2') según dichos ejes (X, Y) una placa (11) de calibración, situada a una profundidad (z), para iluminar una pluralidad de puntos (111) determinados de la placa de calibración (11), mientras que la cámara (10) observa (S2) dicha placa de calibración (11), estableciendo (S3) la unidad de control (9) una correspondencia entre, por un lado, la posición de iluminación (sx) de cada uno de los puntos iluminados (111) de la placa de calibración (11) a la profundidad (z) y, por otro lado, la posición observada (px) por la cámara (10) de los puntos iluminados;
siendo la placa de calibración (11) sucesivamente posicionada (S4) a una pluralidad de profundidades (z) durante la etapa de calibración, para permitir una pluralidad de iluminaciones (S1) por el módulo (6), de observaciones (S2) por la cámara (10) y de establecimientos de correspondencias (S3) por la unidad de control (9);
la unidad de control (9) establece (S5) una relación entre las correspondencias,
- una etapa (E2) de determinación de la forma en tres dimensiones de la superficie (1) que va a ser ablacionada, a partir de la etapa de calibración (E1), por triangulación, y
- una etapa (E3) de ablación de la superficie en tres dimensiones, según la cual la unidad de control (9) controla el módulo (6) en función de la forma determinada de la superficie, para focalizar y dirigir, según unos ejes que definen un plano (X, Y) y según una profundidad (z), el haz (4) sobre la superficie (1) que va a ser ablacionada.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2010/070484.
Solicitante: COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES.
Nacionalidad solicitante: Francia.
Dirección: 25, rue Leblanc, Bâtiment "Le Ponant D" 75015 Paris FRANCIA.
Inventor/es: CHAMPONNOIS,FRANÇOIS, LAVAL,BERTRAND.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B08B15/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B08 LIMPIEZA. › B08B LIMPIEZA EN GENERAL; PREVENCION DE LA SUCIEDAD EN GENERAL (cepillos A46; dispositivos para limpieza del hogar o análogos A47L; separación de partículas sólidas de líquidos o gases B01D; separación de sólidos B03, B07; pulverización o aplicación de líquidos u otros materiales fluidos sobre superficies en general B05; dispositivos de limpieza para transportadores B65G 45/10; operaciones combinadas de lavado, llenado y cierre de botellas B67C 7/00; inhibición de la corrosión o de la incrustación en general C23; limpieza de calles, de vías férreas, de playas o de terrenos E01H; partes constitutivas, detalles o accesorios de piscinas para nadar o para chapotear especialmente adaptados a la limpieza E04H 4/16; protección contra las cargas electrostáticas o supresión de estas cargas H05F). › B08B 15/00 Precauciones tomadas para evitar que la suciedad o los humos escapen de la zona donde han sido producidos; Recogida o retirada de la suciedad o de los humos de esta zona (elementos, detalles o accesorios de los recipientes de cocción para eliminar o para condensar los vapores de cocción en dichos recipientes A47J 36/38; recogida de basuras B65F; dispositivos para la circulación de humos o de vapores, p. ej. conductos, F23J 11/00; eliminación de los humos de cocción en estufas u hornillas de uso doméstico F24C 15/20; acondicionamiento del aire, ventilación F24F). › de una zona pequeña, p. ej. de una herramienta.
- B08B7/00 B08B […] › Limpieza por métodos no previstos en una sola subclase o en un solo grupo de la presente subclase.
- B23K26/00 B […] › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23K SOLDADURA SIN FUSION O DESOLDEO; SOLDADURA; REVESTIMIENTO O CHAPADO POR SOLDADURA O SOLDADURA SIN FUSION; CORTE POR CALENTAMIENTO LOCALIZADO, p. ej. CORTE CON SOPLETE; TRABAJO POR RAYOS LASER (fabricación de productos revestidos de metal por extrusión de metales B21C 23/22; realización de guarniciones o recubrimientos por moldeo B22D 19/08; moldeo por inmersión B22D 23/04; fabricación de capas compuestas por sinterización de polvos metálicos B22F 7/00; disposiciones sobre las máquinas para copiar o controlar B23Q; recubrimiento de metales o recubrimiento de materiales con metales, no previsto en otro lugar C23C; quemadores F23D). › Trabajo por rayos láser, p. ej. soldadura, corte o taladrado.
- B23K26/03 B23K […] › B23K 26/00 Trabajo por rayos láser, p. ej. soldadura, corte o taladrado. › Vigilancia, p. ej. monitorización, de las piezas.
- B23K26/06 B23K 26/00 […] › Determinación de la configuración del haz de rayos, p. ej. con ayuda de máscaras o de focos múltiples.
- B23K26/08 B23K 26/00 […] › Dispositivos que tiene un movimiento relativo entre el haz de rayos y la pieza.
- B23K26/14 B23K 26/00 […] › con una corriente de fluido asociada al haz de rayos, p. ej. un chorro de gas; Boquillas para tal fin (B23K 26/12 tiene prioridad).
- B23K26/16 B23K 26/00 […] › Eliminación de subproductos, p. ej. de partículas o de vapores producidos durante la operación (con ayuda de una corriente de fluido B23K 26/142).
- B23K26/36 B23K 26/00 […] › Retirada de material (B23K 26/55, B23K 26/57 tienen prioridad).
PDF original: ES-2545218_T3.pdf
Fragmento de la descripción:
Procedimiento de ablación de una superficie en tres dimensiones gracias a un dispositivo de ablación láser y gracias al uso de una etapa de calibrado; dispositivo de realización de dicho procedimiento.
La presente invención se refiere a un procedimiento de ablación de una superficie en tres dimensiones gracias a un dispositivo de ablación, comprendiendo el dispositivo:
- una fuente láser para generar un haz láser pulsado;
- un objetivo que permite hacer variar el punto focal del haz láser según una profundidad z;
- un cabezal galvanométrico para dirigir, según unos ejes que definen un plano (X, Y), el haz sobre la superficie que va a ser ablacionada;
- una lente f-theta que permite visualizar el haz láser en una superficie plana en lugar de en una superficie esférica;
- por lo menos una cámara de observación de la superficie en la que se debe realizar una ablación; y
- una unidad de control conectada por lo menos al cabezal galvanométrico, al objetivo y a la cámara (véase, por ejemplo, el documento US 27/173792A).
La invención se refiere también a un dispositivo de realización del procedimiento anterior.
Estado de la técnica
Como se muestra en la figura 1, una solución conocida para efectuar la ablación de una superficie 1, por ejemplo para la restauración de fachadas de edificios o para la descontaminación de instalaciones nucleares, consiste en utilizar la ablación láser.
La ablación láser consiste en retirar una capa de grosor reducido del material a quitar (polvo, pintura, o un contaminante por ejemplo), a través de la interacción de una luz, coherente, focalizada y procedente de un láser pulsado, con este material.
El calentamiento rápido de la superficie de esta capa provoca la vaporización y después la eyección de los primeros estratos del material.
Unos dispositivos 2 de ablación láser conocidos comprenden típicamente una fuente 3 láser prevista para generar un haz 4 láser pulsado y unos medios de transporte de este haz hasta un módulo 6 óptico situado por debajo de la fuente 3 láser, y que está provisto de un objetivo 5, de un cabezal 7 galvanométrico y de una lente 8 f-theta para focalizar y dirigir según los ejes X e Y el haz pulsado sobre la superficie 1 que va a ser ablacionada. El dispositivo 2 comprende también un sumidero 13 y un tubo de evacuación 12 para la evacuación de los materiales ablacionados.
A la salida del objetivo 5 y del cabezal galvanométrico 7, las coordenadas del punto de focalización están situadas sobre una superficie esférica, lo que puede complicar un control del haz. Para superar esta dificultad, la lente f-theta 8 está dispuesta en la trayectoria del haz láser, a fin de situar el punto de focalización en una superficie plana.
Se trata de aportar una cantidad de energía suficiente sobre la capa para alcanzar el límite de ablación de ésta. Pero este no es el único efecto que aporta un haz láser sobre la capa. En efecto, en el momento del impacto láser, se crea una onda de choque y contribuye a separar el material de la superficie 1 en la que es aplicado.
Se ha representado esquemáticamente en la figura 2 la forma clásica de un haz 4.
La fluencia, o densidad de energía (J/m2) necesaria para activar la ablación del material, depende de la naturaleza de éste, del grosor que se desea someter a ablación y de la composición de la superficie.
Los experimentos muestran que se necesita una fluencia de 1 a 5 J/cm2 Por lo tanto, la cantidad de energía transmitida depende de la cantidad de energía transportada por el haz 4 y de la sección de este haz que interactúa con el material a tratar. La sección más pequeña del haz está situada a la distancia de focalización L, una distancia L a la que se sitúa el punto de ablación preferido (véase también la figura 1). Es del orden de 5 cm a partir de la lente 8 por ejemplo.
Como lo muestra la figura 2, el haz 4 tiene una profundidad I de campo importante, que corresponde a la distancia de Rayleigh, es decir aproximadamente 1 cm, permitiendo así trabajar sobre superficies librándose de los defectos de planeidad de esta. El dispositivo está por lo tanto bien adaptado para las superficies en dos dimensiones.
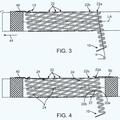
Cuando se desea efectuar una ablación sobre una superficie 1 en tres dimensiones, como se muestra en la figura 3, se debe de asociar un objetivo 5 de enfoque variable a la fuente láser 3 para corregir la distancia L de focalización.
Como se muestra en la figura 4 también, modificando la distancia L de focalización de manera dinámica gracias a una unidad de control 9 es posible controlar la distancia de ablación sobre una superficie 1 en tres dimensiones.
Las técnicas anteriores conocidas presentan sin embargo unos inconvenientes.
La superficie en tres dimensiones debe ser previamente memorizada en la unidad de control 9 para poder ser tenida en cuenta por el dispositivo.
No es posible efectuar una ablación sobre una superficie no conocida previamente, y determinada previamente por unos dispositivos suplementarios de determinación de la superficie, como por ejemplo unos teodolitos, unos ¡nterferómetros, unos sensores conoscópicos, etc.
Además, los dispositivos suplementarios de determinación de una superficie en tres dimensiones del estado de la técnica, necesarios para la determinación previa de la superficie, son caros y voluminosos, y no son convenientes para las aplicaciones de ablación de superficies.
Finalmente, los dispositivos suplementarios no trabajan en el mismo referencial que el dispositivo de ablación, lo que genera unas distorsiones, ya que el dispositivo suplementario no tiene la misma visión de la superficie que va a ser ablacionada que el dispositivo de ablación, y puede generar unos errores de posicionamiento del haz láser.
Se conoce por el documento US 27/173792 una técnica de cualificación y de calibración de un sistema láser, según la cual se cualifica y/o se calibra el sistema láser en función de una desviación en un plano de un haz láser, con respecto a una dirección deseada, observada por un sistema de imágenes.
Se conoce por el documento US 24/14476 una técnica de calibración de un mareaje láser sobre una cara opuesta a una cara observada por un sistema de imágenes.
Se conoce por el documento US 29/22349 una técnica de triangulación de una superficie en tres dimensiones, mediante un sistema de Imágenes que ilumina también la superficie, siendo el sistema distinto de un dispositivo de ablación de la superficie.
Presentación de la invención
Se propone según la Invención pallar por lo menos uno de estos inconvenientes.
Para ello, se propone según la Invención un procedimiento de ablación según la reivindicación 1.
La invención está ventajosamente completada por las características de las reivindicaciones 2 a 9, tomadas solas o en una cualquiera de sus combinaciones técnicamente posibles.
La invención se refiere también a un dispositivo de realización del procedimiento antes citado, definido en la
reivindicación 1.
La invención presenta numerosas ventajas.
La superficie en tres dimensiones no tiene que ser conocida previamente para poder ser tenida en cuenta por la unidad de control: la invención permite efectuar una ablación sobre una superficie no conocida previamente.
Además, la invención no necesita la utilización de dispositivos suplementarios de determinación de una superficie en tres dimensiones. La invención utiliza únicamente unos elementos del dispositivo de ablación que tienen por lo tanto el mismo referencial, y no generan así ninguna distorsión.
Debido a esto, el dispositivo es menos caro y menos voluminoso, lo que es conveniente para las aplicaciones de ablación de superficies.
Presentación de las figuras
Otras características, objetivos y ventajas de la invención destacarán a partir de la descripción siguiente, puramente ilustrativa y no limitativa, y que debe ser leída en relación con los dibujos adjuntos, en los que:
- la figura 1, ya comentada, representa esquemáticamente un dispositivo de ablación conocido;
- la figura 2, ya comentada, representa esquemáticamente un haz láser conocido de ablación;
- las figuras 3 y 4, ya comentadas, representan esquemáticamente la ablación de una superficie en tres
dimensiones;
- la figura 5 representa esquemáticamente las principales etapas de un procedimiento según la invención;
- la figura 6 representa esquemáticamente un posible ejemplo de un dispositivo de realización de un
procedimiento según la invención;
- la figura... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de ablación de una superficie (1) en tres dimensiones gracias a un dispositivo (2) de ablación, comprendiendo el dispositivo (2):
- una fuente (3) láser para generar un haz (4) láser pulsado;
- un módulo (6) óptico para focalizar y dirigir, según unos ejes que definen un plano (X, Y) y según una profundidad (z), el haz (4) sobre la superficie (1) que va a ser ablacionada,
- por lo menos una cámara (1) de observación de la superficie que va a ser ablacionada; y
- una unidad de control (9) conectada al módulo (6) y a la cámara (1); estando el procedimiento caracterizado por que comprende
- una etapa (E1) de calibración del dispositivo (2) según la cual
- el módulo (6) ilumina (S1, S21) según dichos ejes (X, Y) una placa (11) de calibración, situada a una
profundidad (z), para iluminar una pluralidad de puntos (111) determinados de la placa de calibración (11), mientras que la cámara (1) observa (S2) dicha placa de calibración (11), estableciendo (S3) la unidad de control (9) una correspondencia entre, por un lado, la posición de iluminación (sx) de cada uno de los puntos
iluminados (111) de la placa de calibración (11) a la profundidad (z) y, por otro lado, la posición observada
(px) por la cámara (1) de los puntos iluminados;
siendo la placa de calibración (11) sucesivamente posicionada (S4) a una pluralidad de profundidades (z) durante la etapa de calibración, para permitir una pluralidad de iluminaciones (S1) por el módulo (6), de observaciones (S2) por la cámara (1) y de establecimientos de correspondencias (S3) por la unidad de control (9);
la unidad de control (9) establece (S5) una relación entre las correspondencias,
- una etapa (E2) de determinación de la forma en tres dimensiones de la superficie (1) que va a ser ablacionada, a partir de la etapa de calibración (E1), por triangulación, y
- una etapa (E3) de ablación de la superficie en tres dimensiones, según la cual la unidad de control (9) controla el módulo (6) en función de la forma determinada de la superficie, para focalizar y dirigir, según unos ejes que definen un plano (X, Y) y según una profundidad (z), el haz (4) sobre la superficie (1) que va a ser
ablacionada.
2. Procedimiento según la reivindicación 1, en el que, para el establecimiento, para cada profundidad z, de la correspondencia entre
- por un lado, la posición de iluminación sx de cada uno de los puntos iluminados (111) de la placa de calibración (11) a dicha profundidad z, y
- por otro lado, la posición observada px por la cámara (1),
durante la etapa (E1) de calibración, la unidad de control (9) determina (S3) los coeficientes a, b y c que unen px y sx en forma de un polinomio de segundo grado, tal como:
px(sx) = a-sx2 +b-sx + c
(EC 1)
y
la unidad de control (9) determina (S5) también los parámetros a, (J y y que unen todos los pares z y c determinados de este modo anteriormente en forma de un polinomio de segundo grado, tal como:
s(c) = ac + fic + y
(EC 2)
3. Procedimiento según la reivindicación 2, en el que, para la etapa (E1) de calibración, la pluralidad de puntos (111) determinados de la placa de calibración (11) están repartidos según unas líneas continuas o de puntos, y/o unas columnas continuas o de puntos.
4. Procedimiento según una de las reivindicaciones 2 o 3, en el que por lo menos cinco pares (sx, px) se ponen en
correspondencia para cada profundidad z de la placa de calibración (11), para la calibración, siendo la placa de calibración (11) colocada por lo menos en cinco profundidades (z) diferentes.
5. Procedimiento según una de las reivindicaciones 1 a 4, en el que la unidad de control (9) efectúa una corrección de la posición observada (px) por la cámara (1) de los puntos iluminados, para compensar los efectos de la distorsión.
6. Procedimiento según una de las reivindicaciones 1 a 5, en el que, para la etapa (E2) de determinación de la forma en tres dimensiones de la superficie (1), el módulo (6) ilumina (S6) según dichos ejes (X, Y) la superficie (1) que va a ser ablacionada, para iluminar una pluralidad de puntos (sxe) determinados de la superficie (1), mientras que la cámara (1) observa (S7) la superficie (1) y así los puntos iluminados (pxe), determinando (S8) la unidad de control (9) la forma en tres dimensiones de la superficie (1) gracias a las correspondencias y la relación establecida por la unidad de control (9) durante la etapa de calibración.
7. Procedimiento según una de las reivindicaciones 2 a 6, en el que, para la etapa (E2) de determinación de la forma en tres dimensiones de la superficie (1), a partir de la posición observada pxe en la cámara (1) de los puntos iluminados sxe por el módulo (6), la unidad de control (9) determina (S81) el valor gracias a los valores pxe y sxe por la fórmula:
ce - pxe - a sxe2 - b sxe
(EC 3)
utilizando los coeficientes a y b determinados por la unidad de control (9) durante la etapa (E1) de calibración, después determina (S82) la profundidad ze por la fórmula:
ze = a- ce2 + fi ce + y
(EC 4)
utilizando los parámetros a, (3 y y determinados por la unidad de control (9) durante la etapa (E1) de calibración.
8. Procedimiento según la reivindicación 6, en el que la unidad de control (9) realiza una interpolación de pxe y sxe gracias a los coeficientes a y b determinados durante la etapa de calibración (E1).
9. Procedimiento según una de las reivindicaciones 1 a 8, en el que, para la etapa (E3) de ablación, la unidad de control (9) controla el módulo (6) para focalizar y dirigir el haz (4) sobre la superficie (1) que va a ser ablacionada según unas profundidades (z) sucesivas.
1. Dispositivo (2), que comprende:
- una fuente (3) láser para generar un haz (4) láser pulsado;
- un módulo (6) óptico para focalizar y dirigir, según unos ejes que definen un plano (X, Y) y según una profundidad (z), el haz (4) sobre una superficie (1) en tres dimensiones que va a ser ablacionada,
- por lo menos una cámara (1) de observación de la superficie que va a ser ablacionada;
estando dicho dispositivo (2) caracterizado por que comprende además una unidad de control (9) conectada al módulo (6) y a la cámara (1), y adaptada para la realización de un procedimiento de ablación que comprende:
- una etapa (E1) de calibración del dispositivo (2) según la cual
- el módulo (6) ilumina (S1, S21) según dichos ejes (X, Y) una placa (11) de calibración, situada a una profundidad (z), para ¡luminar una pluralidad de puntos (111) determinados de la placa de calibración (11), mientras que la cámara (1) observa (S2) dicha placa de calibración (11), estableciendo (S3) la unidad de control (9) una correspondencia entre, por un lado, la posición de iluminación (sx) de cada uno de los puntos iluminados (111) de la placa de calibración (11) a la profundidad (z) y, por otro lado, la posición observada (px) por la cámara (1) de los puntos iluminados;
siendo la placa de calibración (11) sucesivamente posicionada (S4) a una pluralidad de profundidades (z) durante la etapa de calibración, para permitir una pluralidad de iluminaciones (S1) por el módulo (6), de observaciones (S2) por la cámara (1) y de establecimientos de correspondencias (S3) por la unidad de control (9);
la unidad de control (9) establece (S5) una relación entre las correspondencias,
- una etapa (E2) de determinación de la forma en tres dimensiones de la superficie (1) que va a ser ablacionada, a partir de la etapa de calibración (E1), por triangulación, y
- una etapa (E3) de ablación de la superficie en tres dimensiones, según la cual la unidad de control (9)
controla el módulo (6) en función de la forma determinada de la superficie, para focalizar y dirigir, según unos
ejes que definen un plano (X, Y) y según una profundidad (z), el haz (4) sobre la superficie (1) que va a ser ablacionada.
Patentes similares o relacionadas:
Equipo para marcaje de productos por láser, del 24 de Julio de 2019, de MACSA ID, S.A.: Equipo para marcaje de productos por láser, comprendiendo una carcasa exterior que define al menos un volumen interior, comprendiendo dicho volumen interior […]
Discos de seguridad y método, del 1 de Mayo de 2019, de Donadon Safety Discs and Devices S.R.L: Un disco de seguridad que comprende un elemento de lámina que tiene un espesor(s) de entre 15 μm y 1 milímetro y al menos un corte no […]
Dispositivo de mecanizado por láser y procedimiento para la fabricación de una superficie sobre una pieza bruta, del 17 de Abril de 2019, de Ewag AG: Procedimiento para fabricar al menos un arista de corte delimitada por una superficie de deslizamiento y una superficie libre , en el que se proporciona una […]
Dispositivo de mecanizado por láser y procedimiento para la fabricación de un útil simétrico en rotación, del 20 de Marzo de 2019, de Ewag AG: Procedimiento para la fabricacion al menos de una ranura receptora de virutas y al menos una arista de corte en una pieza bruta , con las etapas: - facilitacion […]
Procedimiento para marcar un código de matriz de datos sobre una pieza de trabajo por medio de un rayo láser, del 19 de Marzo de 2019, de TRUMPF WERKZEUGMASCHINEN GMBH + CO. KG: Procedimiento para marcar un código de matriz de datos en forma de una matriz de n*m celdas claras y oscuras, que consisten cada una de ellas en una matriz de s*t […]
 Método para conformar un stent y un stent obtenido con dicho método, del 2 de Enero de 2019, de MEDTRONIC VASCULAR, INC.: Un método de conformar un stent ; comprendiendo el método:
conformar una forma ondulada a partir de un material conformable, comprendiendo […]
Método para conformar un stent y un stent obtenido con dicho método, del 2 de Enero de 2019, de MEDTRONIC VASCULAR, INC.: Un método de conformar un stent ; comprendiendo el método:
conformar una forma ondulada a partir de un material conformable, comprendiendo […]
Sistema de obtención de imágenes para la eliminación de recubrimientos, del 20 de Septiembre de 2018, de Edison Welding Institute, Inc: Sistema para eliminar un recubrimiento de una superficie, que comprende: (a) un escaner de laser , en donde el escaner de laser incluye ademas […]
Procedimiento y utilización de un dispositivo para la separación de hojas individuales de un panel de vidrio laminado, del 28 de Febrero de 2018, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Procedimiento de separación de al menos una hoja individual de dimensión y forma de borde predefinidas de un panel de vidrio laminado que presenta […]