17 patentes, modelos y diseños de TECNATOM,S.A.
CELDA DE INSPECCIÓN NO DESTRUCTIVA DE PIEZAS CON POSICIONAMIENTO VISUAL.
(16/04/2019) 1. Celda de inspección con posicionamiento visual, para inspección de piezas (P), con un subsistema de inspección , con al menos un sensor , y un subsistema de posicionamiento formado por al menos tres cámaras que detectan la posición de cada sensor , comunicados con un sistema de procesamiento caracterizado por que las frames del subsistema de posicionamiento y los disparos de los sensores del subsistema de inspección están sincronizados por una indexación transmitida por una línea de hardware entre ambos subsistemas .
2. Celda, según la reivindicación 1, cuya sincronización comprende además un marcado de tiempo.
3.…
PROCEDIMIENTO DE INSPECCIÓN DE ESTRUCTURAS HONEYCOMB DE ALUMINIO MEDIANTE CORRIENTES INDUCIDAS.
Sección de la CIP Física
(21/08/2018). Inventor/es: BRAGADO ALONSO,Leticia. Clasificación: G01N27/90.
Procedimiento de inspección de estructuras honeycomb de aluminio mediante corrientes inducidas que comprende: a) posicionar una sonda a una distanciada de la estructura honeycomb a inspeccionar menor de 0,5mm y en posición perpendicular a dicha estructura ; mediante una mesa de coordenadas XY, portadora de la sonda , que incluye un dispositivo de nivelado automático; b) aplicar una corriente alterna a la sonda mediante un equipo para generar un campo magnético que produce una corriente inducida en el aluminio de la estructura ; c) desplazar la sonda sobre toda la estructura , manteniéndola en posición perpendicular a dicha estructura mediante la mesa , controlada por un ordenador , d) captar las corrientes producidas a lo largo de la superficie de la estructura mediante la sonda; y e) obtener una gráfica de las corrientes captadas por la sonda mediante el equipo para visualizarla en una pantalla en la que quedan representadas las discontinuidades presentes en la estructura.
PDF original: ES-2678996_A2.pdf
CELDA Y PROCEDIMIENTO DE INSPECCIÓN CON POSICIONAMIENTO VISUAL.
Sección de la CIP Física
(16/07/2018). Inventor/es: HERNÁNDEZ SERRANO,Sebastián. Clasificación: G01B17/00.
La celda de inspección con posicionamiento visual de piezas (P) posee un subsistema de inspección , con sensores , y un subsistema de posicionamiento de los sensores con al menos tres cámaras . Ambos sistemas se sincronizan entre sí mediante una indexación transmitida por una línea de hardware , por ejemplo acompañados por marcado de tiempo. De esta forma se pueden inspeccionar más piezas (P) o detectar la posición de más sensores .
El procedimiento de inspección con posicionamiento visual de piezas (P), asocia de la lectura de cada sensor a su posición por una indexación entre el subsistema de posicionamiento y el subsistema de inspección que comprende los sensores mediante la línea de hardware , interpolando en caso necesario la posición de los sensores mediante el marcado de tiempo.
PDF original: ES-2676050_A1.pdf
SONDA DE CORRIENTES INDUCIDAS DIGITAL CON SISTEMA DE POSICIONAMIENTO Y MÉTODO APLICADO.
Sección de la CIP Física
(16/07/2018). Inventor/es: RODRIGO GARCIA,JORGE, HERNÁNDEZ RIOJA,Jerónimo. Clasificación: G21C17/017, G01R1/067.
La sonda de corrientes inducidas digital con sistema de posicionamiento para generadores de vapor u otros tubos en centrales nucleares comprende uno o más sensores de corrientes inducidas, una electrónica de adquisición de datos que digitaliza éstos, los analiza y los marca con la posición espacial indicada por un subsistema de posicionamiento en la sonda , todos ellos portados en un conjunto de bloques (201, 203', 205, 207, 209) unidos por un elemento flexible .
De esta forma el método de comprobación aplicado permite marcar directamente los datos digitalizados con la posición de la sonda, incluyendo opcionalmente la posición angular. Este subsistema de posicionamiento permite igualmente identificar el tubo comprobado mediante un método con redundancia.
PDF original: ES-2676036_A1.pdf
Sección de la CIP Física
(23/01/2017). Inventor/es: PIÑEIRO FERNÁNDEZ,Pablo Jesús. Clasificación: G21C17/06.
Escáner para barras de combustible que tiene: dispositivos de inspección de barras ; dispositivos de transporte para desplazar la barra a lo largo del escáner; dispositivos indicadores para generar una señal indicativa de un resultado de un escaneado correspondiente a una barra escaneada (1'').
PDF original: ES-2597858_A1.pdf
PDF original: ES-2597858_B1.pdf
Detector de radiación gamma.
Sección de la CIP Física
(02/02/2016). Inventor/es: PIÑEIRO FERNÁNDEZ,Pablo Jesús. Clasificación: G01T1/20.
Detector de radiación gamma que tiene dispositivos generadores de alta tensión a partir de una tensión de alimentación. Son conocidos los detectores de radiación gamma que requieren un suministro de energía en alta tensión, pues precisan de dicha alta tensión para su funcionamiento. Este suministro en alta tensión complica las instalaciones donde va ubicado el detector de radiación, pues obliga a diseñar todos los elementos auxiliares al detector y la ubicación del detector teniendo en cuenta que hay una línea de alimentación en alta tensión.
PDF original: ES-2558177_A1.pdf
PDF original: ES-2558177_B1.pdf
Dispositivo para medir el diámetro de una barra.
Sección de la CIP Física
(14/01/2016). Inventor/es: PIÑEIRO FERNÁNDEZ,Pablo Jesús. Clasificación: G01B7/12, G21C17/06.
Dispositivo para medir el diámetro de una barra que está compuesto por dos semi-medidores girados uno con respecto al otro 45° y situados de forma contigua. Cada semi-medidor comprende dos placas de iluminación en posición ortogonal y donde cada una de ellas consta de dos fuentes láser (L) configuradas para dirigir los haces de luz láser de forma tangencial hacia los extremos de un mismo diámetro de la barra . Asimismo, cada semi-medidor comprende dos sensores lineales sobre los que la barra proyecta una sombra, estando cada sensor enfrentado a una placa de iluminación . Cada sensor lineal comprende una placa electrónica de control que se conecta a unos medios de adquisición y tratamiento de datos para obtener una medida de diámetro y ovalidad de la barra a partir de las sombras proyectadas por la barra en los sensores.
PDF original: ES-2556303_A1.pdf
PDF original: ES-2556303_B1.pdf
Lector del código identificador de un tubo.
(30/11/2015) Lector del código identificador de un tubo que comprende dos cámaras fotográficas dirigidas hacia el código identificador del tubo , preferiblemente situadas cada una de ellas en un plano perpendicular al tubo y en un plano axial a dicho tubo . El lector comprende también un sistema de iluminación capaz de proporcionar una iluminación homogénea y uniforme del tubo que contiene el código identificador a leer. Generalmente, este sistema de iluminación está basado en una pluralidad de diodos emisores de luz . Para poder visualizar y almacenar la imagen del código de identificación leído, el lector comprende un módulo de adquisición y tratamiento…
Densitómetro para medida de densidades de barras de combustible nuclear.
(17/11/2015) Densitómetro para medida de densidades de barras de combustible nuclear.
Densitómetro para medida de densidades de barras, especialmente, de barras de combustible nuclear formado por dos subsistemas (1, 1'), cada uno de los cuales comprende una fuente radiactiva (11, 11'), un colimador (12, 12') y el detector correspondiente (13, 13'), estando las fuentes configuradas de tal forma que la dirección de la radiación emitida por una de ellas forma 90º con la dirección de la radiación (14') emitida por la otra fuente. El densitómetro así configurado permite obtener dos medidas simultáneamente en la misma zona…
Sistema y método de inspección de varilla de combustible.
(01/12/2014) Sistema de inspección de varilla de combustible que tiene: una placa que tiene: una cara que define una superficie de instalación; una cara opuesta a la primera cara que define una superficie de colocación para ser colocada sobre un rack que contiene una varilla a ser inspeccionada; un dispositivo de inspección : en la superficie de instalación para inspeccionar una varilla a ser inspeccionada.
Sistema modular síncrono para la realización de ensayos no destructivos.
(17/07/2014) Sistema modular síncrono para la realización de ensayos no destructivos el cual comprende al menos: un módulo electrónico conectado con un sensor y que incluye el procesamiento de la señal en tiempo real, una tarjeta de control y sincronismo de todo el sistema y una interfaz de usuario . En sistemas con gran número de canales y/o máquinas con muchos ejes, puede requerirse además un módulo de interfaz con máquina , un concentrador digital para expandir las capacidades del sistema; y donde los relojes de todos los elementos del sistema están sincronizados con el reloj de la tarjeta de control y las conexiones entre todos los elementos del sistema, excepto la interfaz de usuario, se realizan con fibra óptica full-dúplex.
Sonda array integrada para inspección de defectos en componentes mediante corrientes inducidas y método para operación de dicha sonda array.
(08/05/2013) Se proporciona una sonda array que comprende al menos un array de sensores , con un conjunto de sensores individuales (S) formados en capas (Ci) de un substrato de capas múltiples (SCn) y dispuestos alineados en al menos dos filas , estando adaptados estos sensores para conmutar entre un estado emisor y un estado receptor mediante un respectivo bloque multiplexor transmisor/receptor (MUX TX, MUX RX) gobernados por medio de un circuito de control (CTRL). La sonda comprende una primera parte flexible , esencialmente laminar, portante del array de sensores y una primera parte rígida , también esencialmente laminar, que integra los bloques multiplexores, el circuito de control y un dispositivo amplificador (AMP) para elevar el nivel de señal procedente del bloque multiplexor receptor (MUX RX); y estando dicha parte flexible…
Procedimiento de obtención de imágenes calibradas de posición de centros de tubos de un sistema con distribución regular de tubos.
(28/11/2012) Procedimiento de obtención de imágenes calibradas de posición de centros de tubos de un sistema con distribución regular de tubos.
Procedimiento de obtención de imágenes calibradas de posición de centros de tubos T de un sistema con distribución regular de tubos T y conocida en modelo en tres dimensiones, en el que se desplaza una cámara montada en un robot sobre dichas entradas para obtener imágenes de éstas, que comprende una primera etapa de calibración de las imágenes a partir de la distancia entre los tubos T obtenida del modelo geométrico en tres dimensiones y unas etapas sucesivas de desplazamiento de la cámara, adquisición de una nueva imagen y cálculo del desplazamiento de la cámara a partir de dicha nueva imagen, en el que antes del cálculo de cada desplazamiento…
EQUIPO SIMULADOR DE DETECCION DE RADIACIONES.
Sección de la CIP Física
(01/07/1989). Ver ilustración. Inventor/es: ARAGONESES MORATO, JUSTO, GONZALEZ GONZALEZ, FERNANDO. Clasificación: G09B9/00.
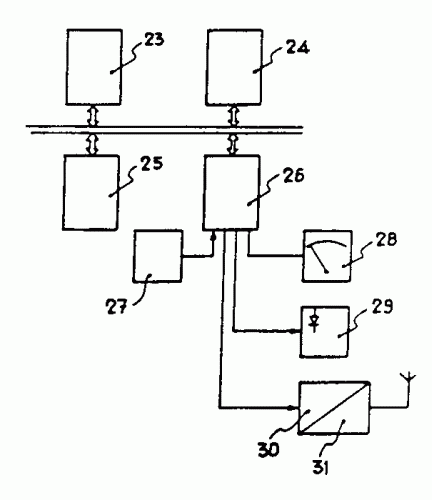
UN EQUIPO SIMULADOR DE DETECCION DE RADIACIONES, QUE ESTA CONCEBIDO PARA SU USO COMO MEDIO DE ENTRENAMIENTO PARA EL PERSONAL ENCARGADO DE REALIZAR LA VIGILANCIA RADIOLOGICA DE INSTALACIONES NUCLEARES Y RADIACTIVAS, PERMITIENDO REALIZAR UN ENTRENAMIENTO DE MEDICIONES DE RADIACION Y CONTAMINACION, SIN RECEPCION ALGUNA DE DOSIS INNECESARIAS POR PARTE DE LOS OPERADORES. DICHO EQUIPO COMPRENDE BASICAMENTE UNA CONSOLA DE OPERATIVIDAD Y DOS DETECTORES SIMULADOS, UNO DE RADIACION Y OTRO DE CONTAMINACION. LA CONSOLA ES OPERADA POR EL INSTRUCTOR Y ENVIA LA INDICACION A LOS DETECTORES VIA RADIO. LA CONSOLA Y DETECTORES SIMULADOS CUENTAN CON UN MICROPROCESADOR Y ORGANOS DE MANDO Y GOBIERNO PARA OPERAR DE ACUERDO CON LAS MEDICIONES O DETECCIONES DE RADIACION Y CONTAMINACION PRESELECCIONADAS. ES DECIR, LAS SEÑALES GENERADAS POR LA CONSOLA SON ENVIADAS, VIA RADIO, HACIA LOS DETECTORES DONDE SON ANALIZADAS Y REPRESENTADAS EN DETERMINADOS INSTRUMENTOS, DE ACUERDO CON LA ESCALA SELECCIONADA.
EQUIPO ULTRASONICO PARA LA INSPECCION DE LOS DISCOS DE ROTORES DE TURBINA.
Sección de la CIP Física
(01/10/1986). Clasificación: G01M13.
Equipo ultrasónico para la inspección de los discos de rotores de turbina, esencialmente caracterizado porque comprende una unidad principal desplazable sobre unos railes, paralelamente al eje de rotor en el que van en castrados los discos a inspeccionar, cuya unidad principal cuenta con una consola de mando con control electrónico, dispositivos de ultrasonidos y medios de adquisición de datos, a la vez de que sobre dicha unidad principal va montado un brazo telescópico en cuyo extremo libre incorpora una unidad portapalpadores que permite realizar las aproximaciones nos radial y angular de ultrasonidos sobre las caras interiores del disco a inspeccionar; habiéndose previsto que dicho brazo telescópico realice la primera aproximación radial mediante el accionamiento de un husillo, en tanto la unidad portapalpadores es actuada mediarte el accionamiento de otro husillo lineal motorizado, todo ello controlado por lo consola de mando asociada a la unidad principal.
APARATO PARA LA INSPECCION AUTOMATICA DE PENETRACIONES EN VASIJAS DE REACTOR, POR EL INTERIOR DE LAS MISMAS.
(01/10/1986) Aparato para la inspección automática de penetraciones en vasijas de reactor, por el interior de las mismas, que estando previsto para su aplicación en la inspección interna de los medios de fijación entre una penetración tubular y una vasija de reactor a través de la cual pasa dicha penetración, se caracteriza porque comprende una serie de elementos asociados estructural y funcionalmente entre si, dentro de los cuales unos se pueden considerar como constitutivos de la parte fija y los otros se consideran como elementos móviles del conjunto; habiéndose previsto que los elementos fijos estén formados por unos motores, unos engranajes, unas bridas de sujeción entre el aparato y la penetración, y unas protecciones antigolpe, mientras que entre los elementos…
APARATO PARA LA INSPECCION AUTOMATICA DE PENETRACIONES EN VASIJAS DE REACTOR, POR EL EXTERIOR DE LAS MISMAS.
Sección de la CIP Física
(01/10/1986). Clasificación: G21C17.
Aparato para la inspección automática de penetraciones en vasijas de reactor, por el exterior de las mismas, que habiéndose diseñado como medio de inspección externa de los elementos que unen y forma parte de las penetraciones tubulares en vasijas de reactor, del tipo preferentemente (BVR), se caracteriza porque comprende una serie de elementos asociados estructural y funcionalmente entre si, e incluidos en tres considerados partes principales, siendo la primera parte denominada estática una se encuentra situada y centrada sobre la propia penetración tubular; denominándose la segunda parte móvil y está formada por un juego de brazos móviles que discurren externamente determinado un eje paralelo al de la penetración, portando el extremo inferior de tal juego de brazos un módulo portapalpadores, mientras que la tercera parte la constituyen los medios de sujeción y autocentrado respecto a la geometría axial de revolución de la citada penetración.
{kind=link}