PROCEDIMIENTO PARA DESACOPLAR UN OBJETO VOLADOR NO TRIPULADO DE UNA AERONAVE PORTADORA.
(21/06/2012) Procedimiento para desacoplar un objeto volador no tripulado de una aeronave portadora en el que el objeto volador posee un dispositivo autónomo de regulación del vuelo, que actúa sobre los dispositivos de mando del objeto volador, con los siguientes pasos:
a) ajuste de los timones de dirección y de altura del objeto volador en una posición neutral, en la que el correspondiente ángulo de timón es 0º;
b) separación de las conexiones eléctricas y mecánicas entre el objeto volador y la aeronave portadora;
c) sensorización de la separación realizada por medio de sensores del objeto volador;
d) activación del dispositivo de regulación del vuelo y control automático del objeto volador por medio del dispositivo de regulación del vuelo y de los dispositivos de mando del objeto volador sobre la base de la corrección de las variaciones…
DISPOSITIVO Y PROCEDIMIENTO PARA EL LANZAMIENTO AUTOMÁTICO DE ARMAS DESDE UNA PLATAFORMA DE EXTRACCIÓN DESPUÉS DE LA EXTRACCIÓN DEL PARACAÍDAS.
(03/02/2012) Plataforma de extracción para el lanzamiento de armas desde aviones militares de transporte a través de la rampa trasera de carga bajada por medio de paracaídas de extracción, en la que - al menos un pilón de armas está montado en el lado inferior de la plataforma de extracción para la recepción de armas, - la plataforma de extracción está conectada con un control de armas, que permanece en el avión de transporte, hasta que se abandona la distancia de seguridad con respecto al avión de transporte a través de un cable umbilical extensible, cuya longitud corresponde a la distancia de seguridad, - la plataforma de extracción dispone de un mecanismo, que solamente activa el…
PROCEDIMIENTO DE VERIFICACIÓN DE UNA UNIDAD DE MEDIDA INERCIAL DE VEHÍCULOS, ESPECIALMENTE DE VEHÍCULOS AÉREOS, EN ESTADO ESTACIONARIO.
(01/06/2011) Procedimiento de verificación de una unidad de medida inercial de vehículos, especialmente de vehículos aéreos, en estado estacionario, - en donde la unidad inercial presenta · al menos un sensor de aceleración que suministra una señal de aceleración en traslación, y · al menos un sensor de velocidad de giro que suministra una señal de velocidad de giro, - en donde la unidad de medida inercial está unida con una disposición de ordenador de navegación dotada de al menos un ordenador, · que presenta un primer elemento funcional que recibe y procesa como datos de entrada las señales de aceleración en traslación suministradas por el sensor de aceleración y las señales…
CABEZA BUSCADORA PARA UN ARTEFACTO VOLADOR ILUMINADOR DE BLANCO.
(16/03/2010) Cabeza buscadora de modo dual para un artefacto volador buscador de blanco, que presenta un detector de láser que recibe los rayos láser reflejados por un blanco marcado por medio de impulsos de láser y un detector de IR que recibe la radiación infrarroja emitida por el blanco, y que comprende también una electrónica de proceso de señales para la conversión de las señales suministradas por los detectores en las señales de guía que controlan el artefacto volador guiado, caracterizada porque una óptica de infrarrojos y una óptica de láser que reacciona a los impulsos de láser están dispuestas concéntricamente una dentro de otra y forman una óptica de entrada común para el canal de láser y el canal de infrarrojos de la electrónica de proceso de señales, estando dispuestos los detectores con respecto a la óptica de entrada de tal manera que…
PROCEDIMIENTO PARA COMPROBAR LA APTITUD FUNCIONAL DE ARTEFACTOS VOLADORES ARMADOS NO TRIPULADOS.
(16/03/2010) Procedimiento para comprobar la aptitud funcional de artefactos voladores armados no tripulados ,
- en el que el artefacto volador comprende un gran número de componentes electrónicos,
- en el que el artefacto volador presenta interfaces de comunicación para comunicar al menos una parte de los componentes con equipos previstos fuera del artefacto volador ,
- en el que al menos algunos de los componentes presentan sensores y actuadores,
- en el que el artefacto volador es abastecido desde fuera con energía, datos y refrigerante durante la comprobación,
- en el que la comprobación comprende al menos
la aptitud funcional de los sensores y actuadores del artefacto volador y
la comunicación del artefacto volador…
DISPOSITIVO DE LANZAMIENTO DE CUERPOS VOLANTES NO TRIPULADOS DESDE UNA AERONAVE.
(03/02/2010) Dispositivo de lanzamiento de cuerpos volantes no tripulados desde una aeronave con al menos un contenedor (2, 2'') para alojar un cuerpo volante (3, 3''), en donde el contenedor (2, 2'') presenta una sección de contenedor superior que tiene un pilón para la sujeción colgante soltable del cuerpo volante (3, 3''), caracterizado porque el contenedor (2, 2'') está previsto sobre una plataforma de carga y presenta una sección de contenedor inferior que está configurada como una zona de apoyo para el cuerpo volante (3, 3'')
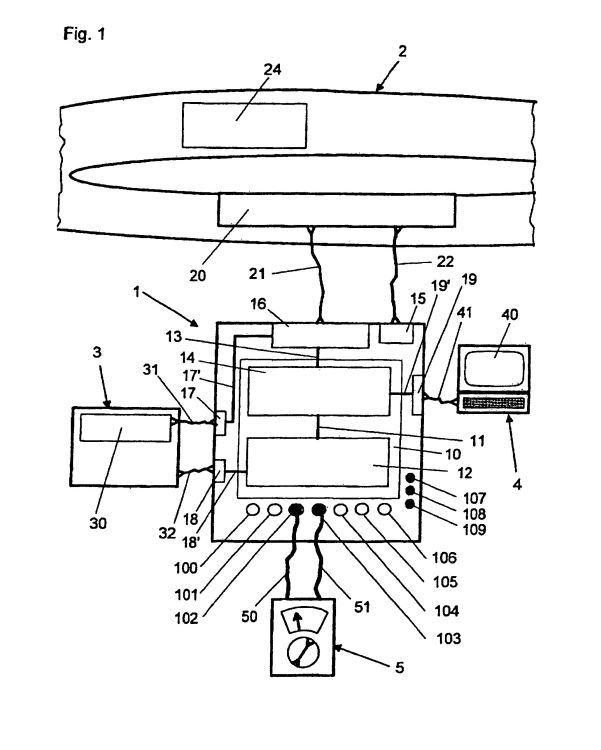
UNIDAD DE PRUEBAS PARA ESTACIONES ARMADAS Y PROCEDIMIENTO PARA PROBAR LA DISPONIBILIDAD PARA EL USO DE UNA ESTACION ARMADA DE UN AEROPLANO.
Sección de la CIP Mecánica, iluminación, calefacción, armamento y voladura
(01/11/2008). Ver ilustración. Inventor/es: GRABMEIER,MICHAEL. Clasificación: F41G7/00.
Unidad de prueba de una estación armada para probar la disponibilidad para el servicio de una estación armada de un aeroplano , con un ordenador integral , que presenta un dispositivo de simulación de armas así como un dispositivo de comprobación y evaluación, en donde el ordenador puede estar conectado eléctricamente con una estación armada de un aeroplano a través de una conexión de estación armada, caracterizada porque el dispositivo de simulación de armas y el dispositivo de comprobación y evaluación trabajan conjuntamente de tal manera que el tráfico de datos entre el dispositivo de simulación de armas y una electrónica de a bordo es controlado en tiempo real desde el dispositivo de comprobación y evaluación durante el proceso de simulación y es controlado respecto a la plausibilidad y exactitud de los datos suministrados por la electrónica de a bordo del aeroplano.
PROCEDIMIENTO PARA LA DETECCION AUTOMATICA DE HELICOPTEROS.
(16/06/2008) Procedimiento para la detección autónoma de helicópteros desde una plataforma volante con un sensor de formación de imágenes, caracterizado porque - las regiones relevantes de la imagen de dos imágenes consecutivas son substraídas unas de las otras punto por punto de la imagen y - dentro de la imagen de la diferencia que se obtiene de esta manera, se determinan los segmentos válidos para la detección a través de un procedimiento del valor umbral, en el que se aplica sobre la imagen de la diferencia un valor umbral para trinarización de la imagen, y los segmentos bipolares de la imagen trinaria son investigados sobre su relevancia con respecto a la pertenencia al rotor principal de un helicóptero, y - a estos segmentos…
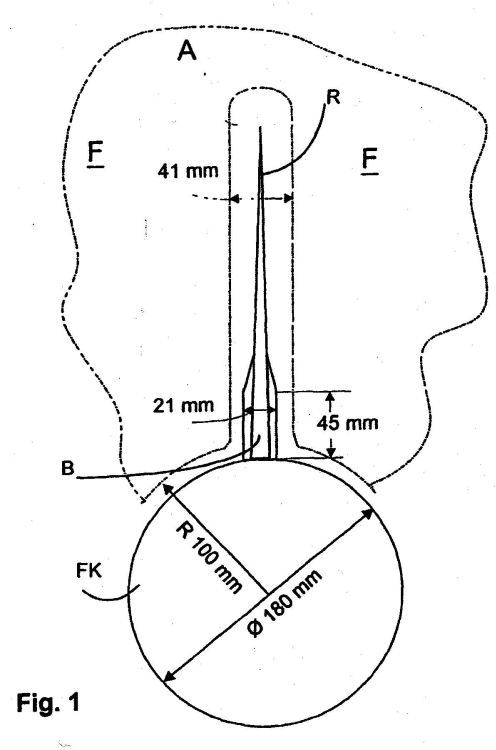
DISPOSITIVO PARA LA CONEXION DE UN TIMON PARA MISILES.
Sección de la CIP Mecánica, iluminación, calefacción, armamento y voladura
(16/09/2007). Ver ilustración. Inventor/es: HETZER, WALTER, LENZ,ERNST. Clasificación: F42B10/62, F42B10/64.
Dispositivo para la conexión del timón para misiles, en el que la hoja del timón (R) es giratoria alrededor de un eje perpendicularmente al eje del misil y el timón presenta un árbol de timón (W) con un extremo (W1) en el lado del misil configurado de forma cónica, caracterizado porque el dispositivo presenta un herraje (B) fijado de forma inmóvil en el lado exterior de la célula del misil (FK) de pared fina, la hoja del timón (R) es giratoria por medio de una palanca de accionamiento del timón y el herraje (B) presenta un cojinete (B1) que se proyecta desde la pared del misil, con un contorno exterior (B2) al menos en parte cilíndrico y con una escotadura cónica (B3) para el alojamiento en unión positiva del extremo (W1) del lado del misil, configurado de una manera correspondientemente cónica, del árbol del timón (W), en el que el diámetro (d1; d2) se estrecha cónicamente desde la escotadura (B3) y el árbol del timón (W) en la dirección de la pared del misil.
SISTEMA PARA ARMA DE MISILES.
Sección de la CIP Mecánica, iluminación, calefacción, armamento y voladura
(16/01/2003). Inventor/es: HIEBL, MAFRED, DIPL.-PHYS. Clasificación: F41G7/22, F41G7/00.
LA INVENCION SE REFIERE A UN SISTEMA DE ARMAS-ARTEFACTO VOLADOR CON UNA OPTICA DE CABEZAL DE BUSQUEDA Y UN PROCESADOR DE ORIENTACION, DONDE MEDIANTE LA ENTREGA DE LAS MAGNITUDES DE ESTRUCTURA DE MARCADO DEL OBJETIVO AL CABEZAL DE BUSQUEDA EQUIPADO CON UN OBJETIVO ZOOM SE ADAPTA EL CAMPO DE BUSQUEDA A LAS MAGNITUDES OBJETIVO Y CON ELLO SE DESCONECTA EL INFLUJO DEL PARALAJE SOBRE LA CORRELACION.
PROCEDIMIENTO PARA INFLUIR SOBRE LA CALIDAD GRAFICA DE LAS IMAGENES SUMINISTRADAS POR UN DISPOSITIVO ELECTRONICO DE CAPTACION DE IMAGENES.
(16/11/2001) ESTE PROCESO SIRVE PARA LA INFLUENCIA DE LA CALIDAD DE IMAGEN DE LAS IMAGENES SUMINISTRADAS POR UN DISPOSITIVO DE RECEPCION DE IMAGEN ELECTRONICO. PARA ELLO SE DEFINEN LOS RECORTES DE IMAGEN QUE RODEAN LOS PUNTOS E IMAGEN INDIVIDUALES. A PARTIR DE LAS SEÑALES DEL PUNTO DE IMAGEN SE CALCULA EL VALOR CARACTERISTICO DE CONTRASTE ASI COMO EL VALOR CARACTERISTICO DE CLARIDAD DEL PUNTO DE IMAGEN CORRESPONDIENTE Y SE COORDINA CON LOS PUNTOS DE IMAGEN INDIVIDUALES. ESTOS VALORES CARACTERISTICOS SON UTILIZADOS FINALMENTE PARA LA MODIFICACION DE LA SEÑAL DE PUNTO DE IMAGEN EN EL SENTIDO DE UNA INFLUENCIA DE CLARIDAD BASICA Y DE PORCION DE CONTRASTE. DE ACUERDO CON LA INVENCION SE ELIGEN SOLAMENTE PUNTOS DE IMAGEN UNICOS COMO PUNTOS…
PROCEDIMIENTO PARA LA DETECCION AUTOMATICA DE OBJETOS FIJOS O MOVILES EN UN ENTORNO NATURAL DE UNA SECUENCIA DE IMAGENES EN TIEMPO REAL.
Sección de la CIP Física
(01/07/2000). Inventor/es: KIESLICH, WOLFGANG, ING.-GRAD., NAHAPETIAN, VAHE, DIPL.-ING., NIEDERHOFER, KARL-HEINZ, DR.-ING. Clasificación: G06T7/00, G01V8/10.
LA INVENCION SE REFIERE A UN PROCEDIMIENTO Y UNA DISPOSICION DE CIRCUITO PARA LA DETECCION AUTOMATICA DE OBJETOS FIJOS O MOVILES EN AMBIENTE NATURAL DE UNA SUCESION DE IMAGENES DE TIEMPO REAL BAJO LA UTILIZACION DE UN SENSOR ELECTROOPTICO QUE EXPLORA EL AMBIENTE Y UNA UNIDAD DE ANALISIS CONECTADA A CONTINUACION, ASI COMO HABIENDOSE PREVISTO EVENTUALMENTE UN EQUIPO DE REPRESENTACION DE IMAGEN. POR MEDIO DE UNA SERIE DE ETAPAS DEL PROCEDIMIENTO O DE MEDIDAS TECNICAS DE CONEXION SE ELABORA LA MAYOR INFORMACION POSIBLE A PARTIR DE LAS IMAGENES DIGITALES, DE TAL MODO QUE ES POSIBLE TAMBIEN LA DETECCION DE OBJETOS MAYORES.
{kind=link}
{kind=link}