(01/04/2020) Dispositivo de montaje para soldar simultáneamente varios portasensores con un parachoques bajo la acción de una presión de apriete, en donde el parachoques presenta una línea horizontal con simetría axial respecto a una línea vertical y con una longitud de parachoques (lS), a lo largo de la cual están practicados agujeros en el parachoques , alrededor de los cuales puede soldarse simultáneamente en cada caso uno de los portasensores , y cada uno de los portasensores está formado por un cilindro hueco con un eje de cilindro y una placa de montaje configurada en perpendicular a este,
que contiene un banco de trabajo unido a un alojamiento , que está diseñado para el parachoques , de modo que cada uno de los agujeros se mantiene en una posición de soldadura , y con una unidad de mecanizado que puede…
Procedimiento y dispositivo para detectar y corregir una ubicación espacial de una pieza de trabajo sostenida en un dispositivo de posicionamiento.
(04/09/2019) Procedimiento para detectar y corregir una ubicación espacial de una pieza de trabajo no simétrica en rotación sostenida en un dispositivo de posicionamiento y para mecanizar la pieza de trabajo con las etapas:
A: posicionar la pieza de trabajo en el dispositivo de posicionamiento ,
B: alimentar un cabezal de mecanizado , que presenta al menos un sensor para la medición de distancia y medios de detección de posición para detectar la posición actual del cabezal de mecanizado , respecto a al menos una posición de medición ,
C: detectar sin contacto una posición real respectivamente de un punto de medición de la pieza de trabajo posicionada en al menos dos posiciones de medición (7, 7I, 7II, 7III) utilizando el cabezal de mecanizado , en donde los al menos dos puntos de…
Conjunto soldado y procedimiento para fabricar un conjunto soldado.
(07/08/2019) Conjunto soldado con una parte de base , formada por un material que absorbe la radiación láser con al menos una primera superficie de unión , y una parte sobrepuesta , con un eje longitudinal (S) y al menos una pieza de collar hecha de un material transparente a la radiación láser, que presenta una segunda superficie de unión con un extremo fijo y un extremo libre y que está dispuesta en una superficie periférica (U), paralela al eje longitudinal (S), de la parte sobrepuesta , en donde la al menos una primera superficie de unión y la al menos una segunda superficie de unión forman una región de unión a través de la cual la parte sobrepuesta está soldada…
Procedimiento para producir una línea de debilitamiento en una pieza de trabajo de extensión plana a lo largo de un contorno predeterminado mediante desprendimiento de material por láser.
(26/06/2019) Procedimiento para producir una línea de debilitamiento mediante desprendimiento de material en una pieza de trabajo de extensión plana, que presenta un lado visible y un reverso opuesto al lado visible , en donde un generador de láser genera un haz láser pulsado con pulsos de láser con una energía determinada mediante una amplitud de pulso y una longitud de pulso que se aportan sucesivamente en ciclos de mecanizado que se repiten varias veces, a lo largo de un contorno predeterminado para la línea de debilitamiento sobre cada uno de los lugares de desprendimiento (a1, ..., an) desde el reverso y en donde por cada lugar de desprendimiento (a1, ..., an) el desprendimiento de material se…
Dispositivo para la soldadura por transmisión láser, procedimiento para la soldadura por transmisión láser y un recipiente cerrado mediante lámina así fabricado.
(16/08/2017) Dispositivo para la soldadura por transmisión láser de al menos una costura de soldadura cerrada sobre sí misma entre un recipiente abierto, que está formado por una estructura de pared que presenta superficies frontales así como superficies de pared interiores y exteriores , rodeando la estructura de pared al menos un espacio hueco con un área de sección transversal, y una lámina que cubre las superficies frontales y que cierra así el recipiente , comprendiendo el dispositivo una fuente de haz láser , que presenta un gran número de emisores de haz láser activables individualmente y dispuestos en una matriz lineal en una dirección x, un alojamiento , diseñado…
Dispositivo para la unión de dos partes de pieza de trabajo con zonas de diferentes propiedades mediante una soldadura de irradiación láser y un homogeneizador.
(18/01/2017) Dispositivo para la unión de dos partes de pieza de trabajo en una pieza de trabajo mediante soldadura de irradiación, por cordones de soldadura que transcurren en un patrón de cordón de soldadura predefinido, en zonas (B1, B2) de diferentes propiedades de las partes de pieza de trabajo, con un alojamiento , que está diseñado para posicionar dos partes de pieza de trabajo , extendidas en dirección x-y una con respecto a otra, en dirección x, y y z de un sistema de coordenadas cartesiano, con una fuente de rayo láser dirigida con su dirección de irradiación sobre el alojamiento y con ello sobre partes de pieza de trabajo posicionadas en este, que se compone de una multitud de emisores de rayo láser dirigibles individualmente, dispuestos en dirección…
Procedimiento para la formación de una línea de debilidad en un elemento de recubrimiento mediante la remoción de material usando rayos láser pulsados.
(06/01/2016) Procedimiento para la formación de una línea de debilidad mediante la remoción de material en un elemento de recubrimiento , que presenta un lado visible y un lado posterior opuesto al lado visible , en el que impulsos de láser , con una energía determinada por una amplitud de impulso y una longitud de impulso, se dirigen sobre el lado posterior y a una velocidad de avance, varias veces repetidos en cada ciclo de mecanizado (Z), introducen a lo largo de una línea imaginaria energía en el elemento de recubrimiento , con lo que debido a la remoción de material se forma la línea de debilidad con por lo menos una ranura que presenta una longitud de ranura (I) y un espesor de pared residual de una pared residual adyacente al lado visible…
Dispositivo para la unión de dos partes de una pieza de trabajo por medio de un cordón de soldadura mediante soldadura por transmisión.
(31/12/2014) Un dispositivo para la unión de dos partes de una pieza de trabajo para formar una pieza de trabajo por medio de un cordón de soldadura, que se extiende al menos en dos dimensiones, mediante soldadura por transmisión,
con un alojamiento que está concebido para posicionar dos partes de una pieza de trabajo que se extienden de forma plana en las direcciones X e Y una respecto a la otra en las direcciones X, Y y Z de un sistema de coordenadas cartesiano, con una fuente de rayos láser orientada con su dirección de irradiación hacia el alojamiento y por lo tanto a las partes de la pieza de trabajo posicionadas…
Dispositivo para la unión de piezas de trabajo.
(29/01/2014) Dispositivo para la unión de una primera pieza de trabajo y una segunda pieza de trabajo con una primera herramienta que presenta un primer contorno y con una segunda herramienta que presenta un segundo contorno , entre las que se pueden disponer de forma superpuesta la primera pieza de trabajo y la segunda pieza de trabajo en un plano de conformado , pudiéndose presionar uno contra otro el primer contorno y el segundo contorno a través de una zona de conformado y al menos una fuente de radiación para proporcionar una radiación electromagnética que sirve para un calentamiento de las piezas de trabajo entre las herramientas , caracterizado por que
- lateralmente a las herramientas está dispuesta respectivamente al menos, en cada caso, una fuente de radiación , de tal manera que su radiación electromagnética está dirigida…
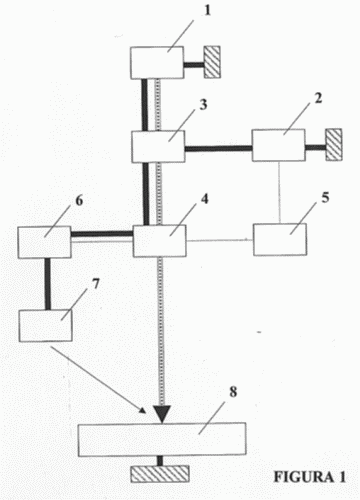
DISPOSITIVO PARA EL MECANIZADO EN 3D ALTAMENTE DINÁMICO DE UNA PIEZA CON UN RAYO LÁSER.
(23/08/2011) Dispositivo para el mecanizado 3D altamente dinámico de una pieza con un rayo láser, compuesto de un robot de brazo articulado con un armazón del robot y un brazo articulado , cuyo extremo estacionario está fijado en el armazón del robot y en cuyo extremo libre está presente una unidad óptica de mecanizado que define un eje óptico , así como un cable de fibras ópticas que está en conexión con el extremo estacionario del brazo articulado para poder acoplar un rayo láser con un eje del rayo en el brazo articulado , en el que el cable de fibras ópticas está en conexión con el extremo estacionario del brazo articulado indirectamente a través de un grupo constructivo de alineamiento y el grupo constructivo de alineamiento comprende una unidad óptica de colimación…
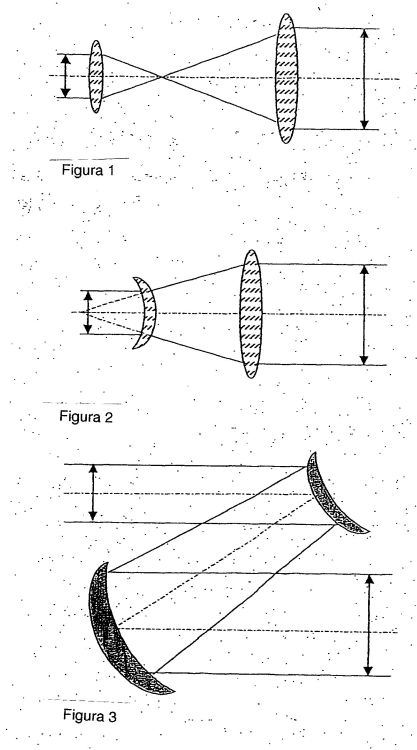
ROBOT DE BRAZO ARTICULADO CON SISTEMA DE GUIADO POR RAYO LASER QUE COMPRENDE UN TELESCOPIO.
Sección de la CIP Técnicas industriales diversas y transportes
(17/08/2009). Ver ilustración. Inventor/es: SCHMIEDER,FRANK, SONNEKALB,DIETER. Clasificación: B25J19/00.
Robot de brazos articulados con un brazo articulado compuesto por varios brazos parciales que están unidos mecánicamente entre sí por medio de articulaciones giratorias y en los que se conduce una radiación láser acoplada en el brazo articulado por medio de un sistema óptico compuesto por espejos fijados en las articulaciones giratorias y por un elemento de enfoque del rayo, existiendo dentro del sistema óptico un telescopio, caracterizado porque el telescopio es un telescopio de espejos que está formado por dos espejos fijados en las articulaciones giratorias.
DISPOSITIVO QUE COMPRENDE UNA UNIDAD DE FORMACION DE UN RAYO DOTADA DE DOS LENTES AXICON PARA INTRODUCIR ENERGIA DE RADIACION EN UNA PIEZA DE UN MATERIAL POCO ABSORBENTE.
(01/11/2008) Dispositivo para introducir energía de radiación en una pieza de un material poco absorbente, con una fuente de radiación y una unidad resonadora , comprendiendo un primer espejo resonador y un segundo espejo resonador , entre los cuales está dispuesta la pieza , caracterizado porque antes de la unidad resonadora está dispuesta una unidad de formación del rayo para generar un haz de rayos de forma anular, con una lente de enfoque y una primera lente Axicon dispuesta a continuación, situada junto con la lente de enfoque sobre un eje óptico común, y cuya superficie óptica de forma cónica está orientada hacia la lente de enfoque…
PROCEDIMIENTO PARA CREAR UNA LINEA INTEGRADA DE ROTURA CONTROLADA EN UNA ESTRUCTURA PALNA.
(16/04/2007) Procedimiento para crear una línea de rotura controlada en una estructura plana de una capa con un lado de mecanizado y un lado decorativo , que está compuesta de un material con una distribución no homogénea de la densidad del material, en el que - un haz de rayos láser se dirige sobre el lado de mecanizado, y produce orificios que no son visibles por el lado decorativo mediante el corte del material en su trayectoria del haz, - el haz de rayos láser y la estructura plana realizan un movimiento relativo entre sí, de modo que los orificios se producen en una hilera a lo largo de la línea deseada de rotura controlada, - el rayo láser se desconecta a continuación en cada caso durante un intervalo de tiempo, determinado por la distancia…
DISPOSITIVO PARA LA MECANIZACION DE PIEZAS DE TRABAJO EXTENDIDAS TRIDIMENSIONALES POR MEDIO DE LASER.
Sección de la CIP Técnicas industriales diversas y transportes
(16/02/2007). Ver ilustración. Inventor/es: FEISTEL,ULF, SCHMIEDER,FRANK, PREUSS,NORBERT. Clasificación: B23K26/14.
Dispositivo para 1a mecanización de piezas de trabajo por medio de láser , especialmente para cortar, perforar, rayar, grabar, taladrar y rotular piezas de trabajo con estructuras tridimensionales de diferentes tamaños. La radiación láser es dirigida sobre un brazo articulado de espejo guiado por robot y un escáner de láser sobre la pieza de trabajo fijada sobre una instalación de retención . En este caso, la radiación láser es conducida a través de la desviación coordinada controlada en el tiempo y en la posición del brazo articulado de espejo y de los elementos de espejo del escáner de láser.
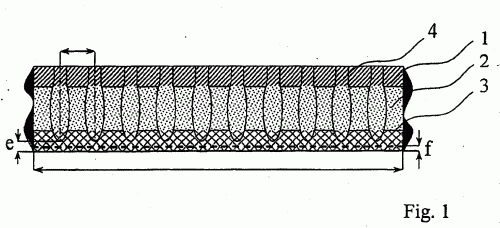
PROCEDIMIENTO PARA REALIZAR UNA LINEA DE ROTURA CONTROLADA DE POCA RESISTENCIA A LA ROTURA EN UNA CUBIERTA DE AIRBAG Y CUBIERTA DE AIRBAG FABRICADA DE ESTA FORMA.
Sección de la CIP Técnicas industriales diversas y transportes
(16/03/2006). Ver ilustración. Inventor/es: PREUSS,NORBERT, GRIEBEL, MARTIN, LUTZE, WALTER, STEINHAUSER, FRANK. Clasificación: B29C37/00, B60R21/20, B29C59/00, B23K26/38.
Procedimiento para realizar una línea de rotura controlada de poca resistencia a la apertura en una cubierta de airbag, compuesta de una capa de soporte , una capa de espuma y una capa decorativa , en el que se realiza mediante láser una serie de agujeros ciegos , caracterizado porque se realizan alternativamente los primeros grupos de agujeros ciegos de una longitud (a) y una cantidad (x) de varios agujeros ciegos planos sólo en el material de soporte , así como los segundos grupos de agujeros ciegos de una longitud (b) y una cantidad (y) de varios agujeros ciegos profundos a través del material de soporte y de la capa de espuma en la capa decorativa y se mantiene la capa de espuma como capa de apoyo en la zona de los primeros grupos de agujeros ciegos.
{kind=link}
{kind=link}
{kind=link}