CIRCUITO PROTECTOR PARA UN CONVERTIDOR.
(30/06/2011) Circuito protector para un convertidor con varias fases (U, V, W), con el que para cada corriente de fase (I1, I2, 13) de las fases (U, V, W) están conectada una señal (U1, U2, U3) proporcional a la respectiva corriente de fase (I1, I2, I3) a un circuito de transformador (1, 2, 10, R1, C1, R2, R3, R4), que para frecuencias de la respectiva señal (U1, U2, U3) por debajo y en el intervalo de una frecuencia límite (fg) actúa como filtro de paso bajo con la frecuencia límite (fg) y por encima de la frecuencia límite (fg) como divisor para la respectiva señal (U1, U2, U3), y con el que las salidas de los circuitos de transformador (1, 2, 10, R1, C1, R2, R3, R4) están conectadas a un formador de máximos (3, D1) para formar un máximo (Max) cuantitativo de…
MÉTODO DE CONTROL DE TRAYECTORIA.
(27/05/2011) Método de control de trayectoria en al menos dos ejes lineales (X, Y, Z) y al menos un eje angular (A, B), en el que se prefija el movimiento de una herramienta frente a una pieza de trabajo mediante un programa de piezas para un Control Numérico , en el que la gestión de velocidad en el Control Numérico se efectúa separadamente para los ejes lineales (X, Y, Z) y los ejes angulares (A, B), caracterizado por que los perfiles de velocidad en los ejes angulares (A, B) se redondean más fuertemente que los perfiles de velocidad en los ejes lineales (X, Y, Z), corrigiéndose desviaciones que surgen de la gestión de velocidad separada del movimiento entre herramienta y pieza de trabajo mediante movimientos de compensación de los ejes lineales (X, Y, Z), de manera que para una desviación dada de los ejes angulares (A, B) de una gestión de velocidad…
DISPOSITIVO DE SEGURIDAD PARA EL TRANSPORTE Y EL MONTAJE DE UNA INSTALACIÓN DE MEDICIÓN.
(12/05/2011) Dispositivo de seguridad para el transporte y el montaje de una instalación de medición para la determinación de la posición de dos componentes (M1, M2) móviles relativamente entre sí con una escala de medición que se extiende en la dirección longitudinal, con un cuerpo de soporte para la escala de medición , con una instalación de exploración que explora la escala de medición , que está guiada a distancia definida de la escala de medición , y con una pata de montaje para la fijación de la instalación de exploración en uno de los componentes (M2) móviles entre sí, en el que el dispositivo de seguridad comprende un cuerpo de base , que es desplazable en la dirección longitudinal a lo largo de una…
PROCEDIMIENTO PARA LA DETERMINACIÓN DE UNA POSICIÓN ABSOLUTA.
(12/04/2011) Procedimiento para la determinación de una posición absoluta con las siguientes etapas del procedimiento: - exploración de un patrón de código de una serie de patrones de códigos, cada uno de cuyos patrones de códigos está definido de manera unívoca y está constituido por varios elementos de códigos (C1, C2, C3), así como exploración de elementos de códigos adicionales: - formación de una palabra de código (CW) con varios bits a través de la exploración del patrón de código; - formación de bits adicionales a través de la exploración de los elementos de códigos adicionales; - verificación de os bits de la palabra de código (CW) así como de los…
UNIDAD DE EXPLORACIÓN E INSTALACIÓN DE MEDICIÓN DE LA POSICIÓN.
(07/03/2011) Unidad de exploración con - una placa de exploración y un soporte , en la que la placa de exploración está fijada en el soporte por medio de varios elementos de fijación , - un elemento excéntrico , que es giratorio alrededor de un primer eje de giro (S6), y que lleva a cabo una articulación de la placa de exploración frente al soporte alrededor de un segundo eje de giro (S7), caracterizada porque - el soporte es una carcasa de la unidad de exploración , y la placa de exploración cierra un espacio de la carcasa , en el que están dispuestos elementos de exploración, - el primero y el segundo eje de giro (S6, S7) están formados, respectivamente, por uno de los elementos de fijación , y - la carcasa se puede fijar por medio de varios tornillos en una parte de la máquina a medir
MONTAJE DE UN SOPORTE DE UNA ESCALA GRADUAL.
(18/01/2011) Disposición para la fijación de un soporte de una medición material de una instalación de medición de longitudes en una superficie de montaje (M) de un objeto a medir, que comprende al menos una garra tensora y un elemento que ejerce una fuerza de desplazamiento que desplaza la garra tensora contra el soporte , en la que la garra tensora colabora en este caso con el soporte de tal forma que la garra tensora desplaza, por medio del elemento que ejerce una fuerza de desplazamiento, el soporte con una componente de fuerza (K2) contra la superficie de montaje (M) y lo desplaza con una segunda componente de fuerza (K1) contra…
PROCEDIMIENTO PARA LA REALIZACION DE UN ENSAYO FUNCIONAL PARA UNA INSTALACION DE MEDICION DE LA POSICION E INSTALACION DE MEDICION DE LA POSICION PARA LA REALIZACION DEL PROCEDIMIENTO.
(28/12/2010) Procedimiento para la realización de un ensayo funcional de una instalación de medición de la posición, que genera valores de posición durante la exploración de una medición material por medio de una unidad de detección de la posición, en el que para la verificación funcional a) se genera en la instalación de medición de la posición al menos un valor de control, que presenta una relación matemática definida con respecto a uno de los valores de posición, en los que entra como parámetro un valor de corrección registrado en la instalación de medición de la posición, b) se transmite el valor de control junto con el valor de posición asociado a una unidad de evaluación dispuesta a continuación de la instalación de medición de la posición, y c) se verifica en la unidad…
EQUIPO DE MEDICION DE POSICION PARA LA DETERMINACION DE LA SITUACION DE DOS PARTES CONSTRUCTIVAS MOVILES DE FORMA RELATIVA ENTRE SI.
(03/05/2010) Equipo de medición de posición para la determinación de la situación de dos partes constructivas móviles de forma relativa entre sí, con
- una división de medición que tiene un recorrido a lo largo de una dirección de medición,
- un cuerpo de soporte que lleva la división de medición,
- un equipo de exploración que explora la división de medición, que se guía en dirección de la medición de forma móvil a lo largo del cuerpo de soporte,
- un pie de montaje del equipo de exploración con medios de sujeción asignados (26a, 26b) para la sujeción del equipo de exploración en una de las partes constructivas móviles entre sí y
- un sistema de seguridad de transporte con el que el equipo de exploración se puede retener en al menos una posición de transporte…
METODO PARA LA PRODUCCION Y EL MONTAJE DE UN CUERPO CON UNA ESCALA DE ANGULO.
(11/01/2010) Método para la producción y el montaje de un cuerpo con una escala de ángulo , con las siguientes etapas:
aplicación de al menos tres marcas (A, B, C) sobre el cuerpo , donde las marcas (A, B, C) se disponen en dirección periférica del cuerpo separadas entre sí,
ajuste del cuerpo con respecto a un dispositivo de soporte de tal manera, que las separaciones (AM, BM, CM) entre las marcas (A, B, C) y un punto (M), que es estacionario con respecto al dispositivo de soporte y se sitúa sobre su eje de giro (Z), tengan el mismo tamaño,
aplicación de una escala de ángulo sobre el cuerpo ajustado con respecto al dispositivo de soporte ,
desmontaje del cuerpo provisto de la escala de ángulo del dispositivo de soporte ,
montaje del cuerpo provisto de la escala de ángulo sobre una parte…
INSTALACION DE MEDICION DE LA POSICION.
(02/12/2009) Instalación de medición de la posición, que está constituida por una escala y por una unidad de exploración móvil con relación a la escala en una dirección de medición (x),
- en la que sobre la escala están dispuesta una primera y una segunda pista con zonas parciales sucesivas de diferente capacidad de reflexión, a partir de cuya exploración con la ayuda de la unidad de exploración se pueden generar una primera y una segunda señales de exploración (INC G2, ABS) en función de la posición, y
- la unidad de exploración está configurada de tal forma que a partir de una de las dos pistas se puede generar una tercera señal de exploración (INC G2), que presenta un comportamiento de cabecero diferente, en virtud de movimientos de cabeceo de la unidad de exploración…
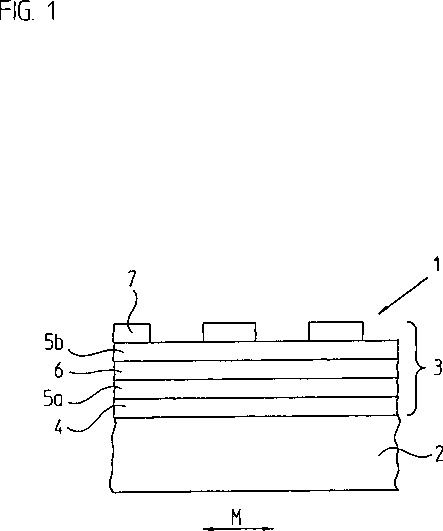
ESCALA CON UNA RED DE FASE REFLECTANTE.
Sección de la CIP Física
(27/11/2009). Ver ilustración. Inventor/es: FLATSCHER,GEORG. Clasificación: G01D5/38, G01D5/347B, G01D5/347, G01B5/18.
Escala para un sistema de medición de la posición interferencial, con una red de fase reflectante que presenta de forma alterna capas con alta refracción y capas con baja refracción (5a, 5b) en una pila de capas reflectante, dispuesta sobre un sustrato , caracterizada por que las capas con alta refracción consisten en silicio y las capas con baja refracción (5a, 5b) consisten en dióxido de silicio.
EQUIPO OPTICO DE MEDICION DE LA POSICION.
(12/11/2009) Equipo óptico de medición de la posición, compuesto por
- una escala con una graduación de escala con marcas de graduación de escala, que se disponen periódicamente en una dirección de medición (x) con un periodo de graduación de escala (TPM),
- una unidad de exploración móvil con respecto a la escala en al menos una dirección de medición (x) con
- una fuente de luz
- al menos una graduación de exploración periódica compuesta por marcas de graduación de exploración, que se disponen periódicamente a lo largo de la dirección de medición (x) con un periodo de graduación de exploración TPA, donde el periodo de graduación de escala TPM y el periodo de graduación de exploración TPA se diferencian entre sí y
-…
METODO PARA LA ORIENTACION DE UN HUSILLO.
(03/11/2009) Procedimiento para la orientación del husillo de un husillo controlado numéricamente y que gira rápidamente, con el que se leva el husillo desde un número de revoluciones de arranque (Ns) a una posición de reposo predeterminada, en el que el husillo se frena en una primera fase (P1) a un primer número de revoluciones límite (Ng1), y en una segunda fase (P2) bajo regulación de la posición se activa la posición de reposo definida, en el que se selecciona un segundo número de revoluciones límite (Ng2) por encima del primer número de revoluciones límite (Ng1) de tal manera que entre la consecución del segundo número de revoluciones límite (Ng2) y la consecución del primer número de revoluciones límite (Ng1) transcurre un periodo de tiempo (DELTAT), que permite una preparación del regulador de posición para una conmutación estable en la posición y/o en…
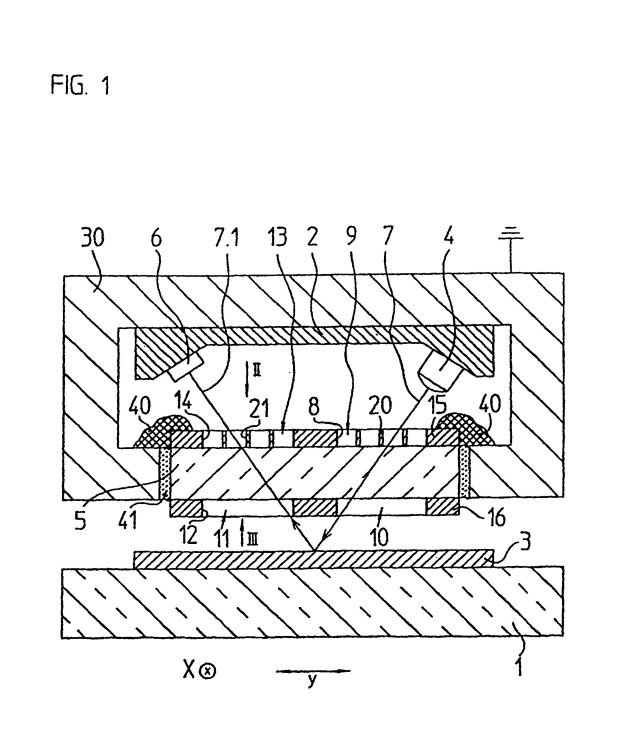
INSTALACION OPTICA DE MEDICION DE LA POSICION.
Sección de la CIP Física
(24/09/2009). Ver ilustración. Inventor/es: HUBER, WALTER, HOLZAPFEL, WOLFGANG, TONDORF,SEBASTIAN, PECHAK,PETER, MAUERBERGER,HERBERT, OBERMAIER,FRANZ, HIHENTINGER,JOSEF. Clasificación: G01D5/347.
Instalación óptica de medición de la posición con #- una escala ; #- una instalación de exploración móvil con relación a la escala en una dirección de medición X, que presenta una placa de exploración con al menos una ventana transparente , en la que la ventana transparente está delimitada por una pantalla opaca , caracterizada por #- una estructura configurada parcialmente al menos en la zona de la ventana de un material conductor de electricidad, que está configurado de tal forma que no provoca ninguna modulación considerable en función de la posición de un haz de rayos de luz.
METODO PARA LA DETECCION DE ERRORES EN UN EQUIPO DE ACCIONAMIENTO.
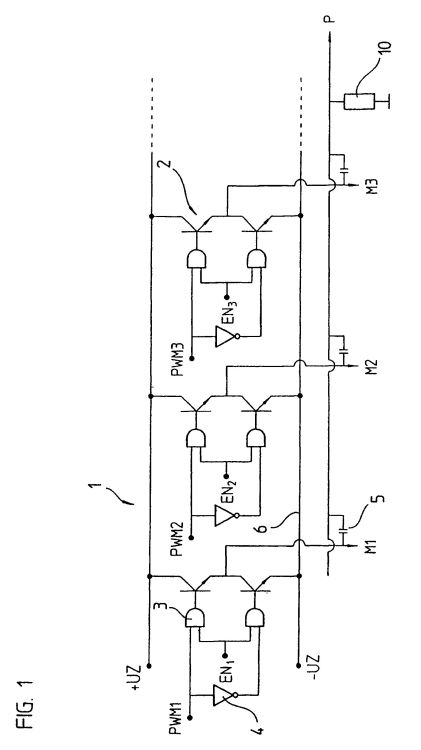
(31/07/2009) Método para la detección de errores en un equipo de accionamiento con un motor eléctrico multifásico , un convertidor de corriente preconectado al motor eléctrico y un regulador , que genera señales de PWM, donde el convertidor de corriente controla la tensión en las fases individuales del motor eléctrico y las corrientes de fase en las fases del motor eléctrico tienen un recorrido respectivamente periódico, donde las señales de entrada (PWM.U1, PWM.U2, PWM.U3) del convertidor de corriente se forman dependiendo de señales de salida (PWM1, PWM2, PWM3) del regulador , caracterizado por que para la detección de errores se miden varias corrientes de fase (I1, I2) del motor eléctrico en un punto predefinido del respectivo periodo con variación simultanea de las tensiones correspondientes (U1, U2) en las respectivas fases del motor eléctrico y los…
EQUIPO DE MEDICION DE LA POSICION.
Sección de la CIP Física
(29/05/2009). Ver ilustración. Inventor/es: MITTERREITER, JOHANN. Clasificación: G01D5/347.
Equipo de medición de la posición con #- un medio de medición ; #- una unidad de exploración para la exploración del medio de medición , #-- un dispositivo de ajuste con un elemento de graduación para el ajuste de la situación de la unidad de exploración con respecto al medio de medición , donde entre el elemento de graduación y la unidad de exploración se dispone un mecanismo de desmultiplicación, que transforma un movimiento de graduación del elemento de graduación en un movimiento de graduación más corto de la unidad de exploración , caracterizado porque #- el mecanismo de desmultiplicación presenta una disposición de palanca con articulaciones , que transforma el movimiento de graduación del elemento de graduación en un movimiento de graduación lineal de la unidad de exploración con respecto al medio de medición.
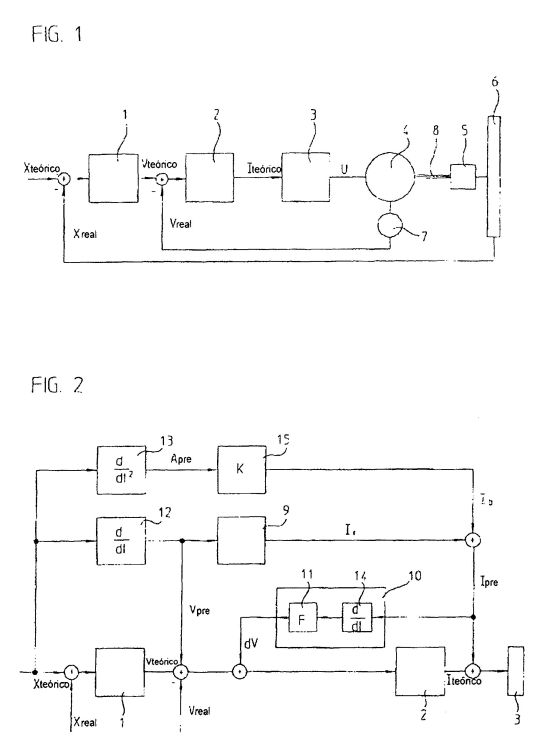
ESTRUCTURA DE REGULADOR QUE COMPRENDE UN MODELO DE TORSION.
Secciones de la CIP Física Electricidad Técnicas industriales diversas y transportes
(21/05/2009). Ver ilustración. Inventor/es: KOHLER,FRIEDER, WASTLHUBER,BERNHARD. Clasificación: G05B13/02, H02P6/00, G05B19/416, G05B19/404, G05B19/19, B23Q15/00, G05B11/00.
Estructura de regulador para la regulación de posición de un objeto , que se acciona mediante una mecánica por un motor , con un regulador de posición para la formación de un valor teórico de revoluciones (Vteórico) a partir de un valor teórico de posición (Xteórico) y un valor real de posición (Xreal), seguido de un regulador de número de revoluciones para la formación de un valor teórico de corriente (Iteórico) a partir del valor teórico de revoluciones (Vteórico) y un valor real de revoluciones (Vreal), así como un circuito para la formación de una corriente de control previo (Ipre) a partir del valor teórico de posición (Xteórico), donde la corriente de control previo (Ipre) se conecta al valor de corriente teórica (Iteórico), caracterizada porque la corriente de control previo (Ipre) se conecta además a un modelo para el control previo de torsión, cuya señal de salida (dV) se conecta al valor teórico de revoluciones (Vteórico).
PROCEDIMIENTO Y APARATO PARA COMPROBAR UN CONVERTIDOR.
Sección de la CIP Física
(16/04/2009). Ver ilustración. Inventor/es: KRANITZKY,WALTER. Clasificación: G01R31/02, G01R31/42, G01R31/28.
Método para la comprobación de un convertidor, en el que se activan selectivamente elementos de conmutación individuales del convertidor , con las siguientes etapas: #(a) exposición de una entrada de control (PWM1, PWM2, PWM3) de cada fase del convertidor a un patrón de control (PWM), #(b) detección de un patrón de tensión (M) que se presenta en una conexión de motor (M1, M1, M3) del convertidor por una única línea de comprobación acoplada de forma capacitiva a todas las conexiones de motor (M1, M2, M3). #(c) comparación del patrón de control (PWM) aplicado en la etapa (a) con el patrón de tensión (M) detectado en la etapa (b) para cada fase. #(d) detección de un error en el convertidor con desviación del patrón de tensión (M) detectado en la conexión de motor (M1, M2, M3) del patrón de tensión (M) esperado debido al patrón de control (PWM) aplicado en la entrada de control (PWM1, PWM2, PWM3).
DISPOSITIVO DE CARCASA PARA MEDICION DE ANGULOS.
(16/03/2009) Instalación de medición de ángulos con - una carcasa , que presenta en una pared de la carcasa , forma una superficie básica extrema de la carcasa con un centro (M); al menos un orificio ; - una tapa para cerrar al menos un orificio ; - un medio de conexión , dispuesto detrás de al menos un orificio en la pared de la carcasa , que sirve para la conexión de un árbol de la instalación de medición de ángulos con un cuerpo a medir, en el que a través de este orificio se puede activar el medio de conexión , y - al menos un lugar de fijación previsto en la pared de la carcasa para la fijación de la tapa con respecto a la pared de la carcasa , caracterizada porque - en la pared de la carcasa está prevista una zona de fijación que incluye el centro (M), sobre la que, para la fijación de la tapa…
METODO Y DISPOSITIVO PARA LA TRANSMISION DE DATOS ENTRE UNA UNIDAD DE PROCESAMIENTO Y VARIOS EQUIPOS DE MEDICION DE LA POSICION.
(16/03/2009) Método para la transmisión de datos entre una unidad de procesamiento y varios equipos de medición de la posición , que están unidos entre sí en una topología de bus lineal, donde para el tratamiento simultáneo de una señal de solicitación de datos de posición (RQ) en los equipos de medición de la posición se tiene en cuenta respectivamente para cada equipo de medición de la posición un valor de corrección de retardo específico dependiente del tiempo de recorrido (dD1, dD2, dD3), de tal forma que a partir de la aparición de una señal de solicitación de datos de posición (RQ) en el lado de la unidad de procesamiento a lo largo de la transmisión de una palabra de datos (DATA2) hasta el tratamiento simultáneo de la señal de solicitación de datos de posición (RQ) en todos los equipos de medición de la posición se produce…
UNIDAD DE EXPLORACION DE UN DISPOSITIVO OPTICO DE MEDICION DE LA POSICION Y DISPOSITIVO OPTICO DE MEDICION DE LA POSICION.
Sección de la CIP Física
(01/03/2009). Ver ilustración. Inventor/es: MARTIN,BARBARA, SCHENK,OLIVER. Clasificación: G01D5/347, G01D5/26.
Una unidad de exploración de un dispositivo óptico de medición de la posición con una fuente de luz para la iluminación de una escala mediante un haz de luz (L) y con un detector para la detección del haz de luz (L) modulado dependiendo de la posición por la escala , donde un espacio interno (IR) de la unidad de exploración , por el que pasa el haz de luz (L), está cerrado de forma estanca a polvo con respecto a un espacio externo (AR) y el espacio interno (IR) está cerrado por cuerpos transparentes , por los que pasa el haz de luz (L), penetrando por uno de los cuerpos transparentes y saliendo por otro de los cuerpos transparentes , caracterizada porque el espacio interno (IR) está unido con el espacio externo (AR) por un filtro , que es estanco a polvo, sin embargo, permeable a gas y vapor.
ACOPLAMIENTO Y DISPOSITIVO DE MEDICION DE ANGULO DE TAL ACOPLAMIENTO.
(16/12/2008) Acoplamiento para la conexión elástica radial, pero fija contra giro, de dos componentes con - elementos de base (1.11 a 1.16; 1.11'' a 1.16''), - varias pestañas (1.31 a 1.36) formadas integralmente en los elementos de base (1.11 a 1.16'', 1.11'' a 1.16'') en las zonas nodales (1.21 a 1.26), en el que las pestañas (1.31 a 1.36) presentan dos puntos de apoyo (1.311 a 1.362) distanciados entre sí en dirección circunferencial y una de las zonas nodales (1.21 a 1.26), respectivamente, se encuentra en la dirección circunferencial entre puntos nodales (1.311 a 1.362) y las zonas nodales (1.21 a 1.26) forman la…
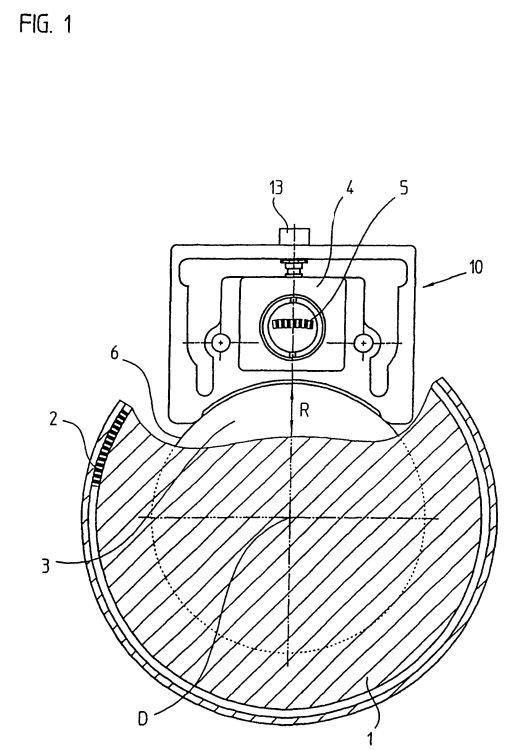
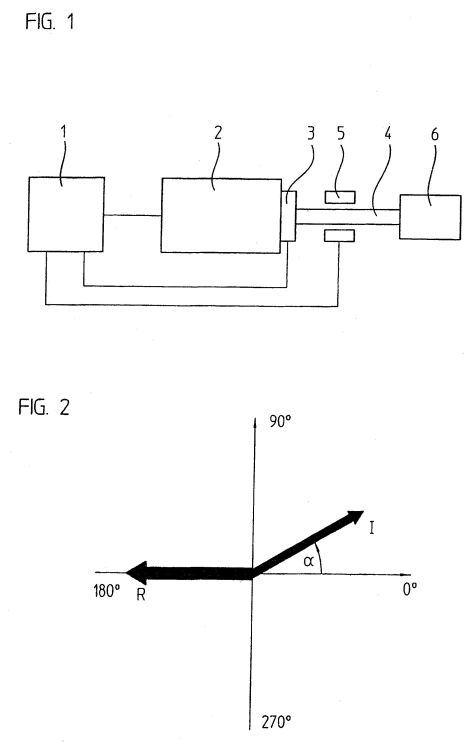
METODO PARA LA DETERMINACION DE LA POSICION DEL ROTOR DE UN MOTOR SINCRONICO.
Sección de la CIP Electricidad
(01/12/2008). Ver ilustración. Inventor/es: KRANITZKY,WALTER, QUENTEL,GERHARD. Clasificación: H02P6/16.
Un método para la determinación de la posición del rotor de un motor sincrónico , en el que el motor se sujeta por un gran rozamiento de reposo, que se compone de las siguientes etapas: - aplicación de una pluralidad de vectores de corriente (I) en el motor sincrónico en diferentes sentidos, comprobación de la magnitud del vector de corriente (I) necesaria para la obtención de una desviación definida del rotor (R), obteniéndose por la desviación del rotor (R) un par de retorno proporcional a la desviación, por el que el rotor (R) vuelve después de la desconexión de cada vector de corriente (I) a su posición de partida, - cálculo de la posición del rotor a partir de al menos una posición angular del vector de corriente (I), donde la magnitud del vector de corriente (I) necesaria para la obtención de la desviación definida del rotor (R) es mínima.
DISPOSITIVO DE MEDICION DE LA POSICION Y METODO PARA EL ACCIONAMIENTO DE ESTE DISPOSITIVO.
(01/12/2008) Un dispositivo de medición de la posición con - elementos de exploración (6 a 10) que están asignados a al menos una graduación de medición periódica móvil con respecto al mismo y que exploran el mismo y; - un elemento constituyente para la formación de un valor de medición de la posición, donde las señales de exploración (S6 a S10) de varios elementos de exploración (6 a 10) están en este elemento constituyente y en la salida hay una palabra de código (P) que define la posición; - un elemento constituyente de salida para la emisión digital de la palabra de código (P) sobre un canal de datos , caracterizado por - un dispositivo de transformación para la transformación de varias señales de exploración (S6, S7) analógicas con desplazamiento de…
DISPOSITIVO Y METODO PARA EL CONTROL DE UNA MAQUINA HERRAMIENTA.
(01/12/2008) Un dispositivo para el control de una máquina herramienta, comprendiendo el dispositivo los siguientes componentes: a) al menos un banco de datos con datos adicionales, que se requieren para el mecanizado de la pieza, donde el banco de datos está organizado de forma aleatoria, b) una unidad de procesamiento , que comprende las siguientes unidades funcionales: b1) una interfaz de entrada para un programa de mecanizado , que es adecuado para el control de la máquina herramienta durante el mecanizado de la pieza, comprendiendo el programa de mecanizado también órdenes de acceso al banco de datos en un lenguaje de banco de datos normalizado, b2) una interfaz de banco de datos para el banco de datos b3) una unidad de interpretación…
METODO PARA EL ACCIONAMIENTO DE UN DISPOSITIVO DE MEDICION DE LA POSICION Y DISPOSITIVO DE MEDICION DE LA POSICION ADECUADO PARA EL MISMO.
(01/12/2008) Un método para el accionamiento de un dispositivo óptico de medición de la posición para la determinación de la posición de dos objetos móviles entre sí, en el que - desde el dispositivo de medición de la posición se transmiten datos a una unidad de evaluación posterior , demandando la unidad de evaluación mediante pulsos de ciclo de demanda (ATP), que están separados por determinados tiempos de ciclo de demanda (Deltat NC), la transmisión de datos al dispositivo de medición de la posición , - la fuente de luz del dispositivo de medición de la posición se acciona por ciclos, habiendo entre pulsos de activación de la fuente de luz (LP)…
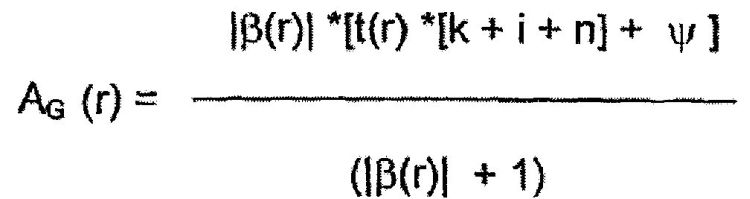
DISPOSITIVO OPTICO DE MEDICION DE LA POSICION.
Sección de la CIP Física
(01/12/2008). Ver ilustración. Inventor/es: MAYER,ELMAR, BENNER,ULRICH. Clasificación: G01D5/347, G02B3/00, G01B1/00, G01D5/38.
Un dispositivo óptico de medición de la posición con una unidad de exploración , que contiene una fuente de luz , un plano de representación y una óptica de lentes para la generación de una imagen de una estructura de red periódica en el plano de representación caracterizado porque la óptica de lentes se compone de una serie de lentes periódica con el periodo de red o la separación mutua entre lentes adyacentes (Ver fórmula) con A G (r) el periodo de red de la serie de lentes, t (r) el periodo de la estructura de red periódica , |Beta(r)| la magnitud absoluta de la escala de representación Beta de la serie de lentes , psi un salto de fase predeterminable, definido, r el radio de la disposición de red, donde para una red lineal r = infinito y A G, t y |Beta| son constantes, i, k, n epsilon N, es decir, son números naturales incluyendo el cero.
DISPOSITIVO OPTICO DE MEDICION DE LA POSICION.
(01/12/2008) Un dispositivo óptico de medición de la posición con un medio de medición y una unidad de exploración móvil con respecto al mismo al menos en un sentido de medición (x), donde el dispositivo de medición de la posición comprende una fuente de luz , una graduación de emisión opcional, una graduación de proyección , una graduación de detección, una graduación de Vernier opcional así como varios elementos de detector optoelectrónicos y la luz de la fuente de luz proyecta interactuando con la graduación de proyección un patrón de franjas sobre la graduación de detección, de tal forma que se pueden detectar señales de salida dependientes del desplazamiento mediante los elementos de detector,…
DISPOSITIVO DE MEDICION DE POSICION.
(01/12/2008) Un dispositivo de medición de la posición con #- un medio de medición , que comprende al menos una graduación de medición que se extiende a lo largo de una recta o a lo largo de una línea curvada, #- un dispositivo de exploración para la exploración de la graduación de medición mediante una fuente de luz , #- una unidad de recepción del dispositivo de exploración , mediante la cual se pueden recibir para la evaluación los rayos de luz emitidos por una fuente de luz y modificados por la graduación de medición y #- una disposición de lentes dispuesta entre el medio de medición y la unidad de recepción , formada por lentes ópticas para la generación de una imagen definida de la graduación de medición en la unidad de recepción , donde la disposición de lentes está configurada para la generación de una imagen (20'') de…
DISPOSITIVO DE MEDICION DE LA POSICION PARA LA DETERMINACION DE LA POSICION ABSOLUTA.
(01/12/2008) Un dispositivo de medición de la posición compuesto por una escala (1; 10; 10'') así como una unidad de exploración móvil en un sentido de medición (x) con respecto a la escala (1; 10; 10'') que, a partir de la exploración de la escala (1; 10; 10''), determina la posición absoluta de la unidad de exploración con respecto a la escala (1; 10; 10''), donde la escala se compone de una pista que se extiende al menos en un sentido de medición y en la pista se disponen de forma alterna zonas parciales de igual anchura con diferentes propiedades ópticas y en la pista se disponen al menos primeras, segundas y terceras zonas parciales (TB1, TB2, TB3; TB1''; TB2''; TB3'') con diferentes propiedades ópticas, caracterizado porque la unidad de exploración asigna a una primera combinación de dos zonas parciales diferentes sucesivas…
DISPOSITIVO DE CONTROL DE UN EQUIPO DE MEDICION DE POSICION.
(16/11/2008) Un dispositivo de control para controlar la altura de amplitud de al menos una señal de exploración analógica (S1 a S4) de un equipo de medición de la posición con - un medio detector para la determinación de la altura de amplitud de la señal de exploración (S1 a S4) y generación de una señal de amplitud (A) dependiente de la misma; - un medio para la formación de una señal de desviación (B) por comparación de la señal de amplitud (A) con una señal teórica predeterminada (F) y con - un medio de indicación para proporcionar una indicación dependiendo de la señal de desviación (B), caracterizado por un - equipo de evaluación para ponderar de forma diferente la señal de desviación (B), de tal forma que una modificación de la señal…
UN SISTEMA DE SENSOR QUE COMPRENDE UN SENSOR DE ACELERACION Y UN SENSOR DE POSICION.
(01/11/2008) Un sistema codificador con un codificador para la determinación de la aceleración y un codificador para la determinación de la posición, en el que: - el codificador para la determinación de la aceleración se compone de un cuerpo con una estructura de medición eléctricamente conductora, no ferromagnética así como un dispositivo para la generación de un campo magnético (Phi1), que actúa sobre la estructura de medición y de un detector para la detección de un campo de medición magnético (Phi2) o de modificaciones de campo, que se genera debido a corrientes turbulentas generadas en la estructura de medición ; - el codificador para la determinación de…
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}