Contenedor marítimo que puede cerrarse por todos los lados.
(06/09/2017) Contenedor marítimo que puede cerrarse por todos los lados con una estructura de base, que presenta cuatro columnas angulares, un marco de techo y una construcción de marco de suelo, estando unidas las columnas angulares de manera firme con el marco de techo y la construcción de marco de suelo, caracterizado porque la construcción de marco de suelo
a) presenta un marco portante, estando fijados en el marco portante unos elementos instalados dentro del contenedor marítimo y presentando el marco portante unos medios de anclaje para anclar y absorber las fuerzas de acción horizontal; y presentando además la construcción de marco de suelo
b)…
Lámpara con LED y circuito de excitación así como procedimiento para hacer funcionar una lámpara.
(24/12/2014) Lámpara con LED (14a a 14c) conectados en serie y/o en paralelo y con un circuito de excitación para la alimentación eléctrica de los LED (14a a 14c), en la que el circuito de excitación está diseñado para funcionar con una tensión alterna de red sinusoidal y presenta una entrada de excitador para introducir la tensión alterna de red sinusoidal y una salida de excitador unida con los LED (14a a 14c) así como un circuito rectificador, en la que la entrada de excitador está configurada para introducir la tensión alterna de red sinusoidal en el circuito rectificador y el circuito rectificador está configurado para rectificar la tensión alterna de red sinusoidal y el circuito de excitación presenta en…
Procedimiento y dispositivo para detectar cambios de rumbo y/o cambios de velocidad de un objetivo.
(12/02/2014) Procedimiento para detectar cambios de rumbo y/o cambios de velocidad de un objetivo por medio de un gran número de ángulos de marcación medidos en diferentes momentos, que se determinan mediante la recepción de manera selectiva con respecto a la dirección de ondas sonoras radiadas o emitidas por el objetivo por medio de una disposición de captadores de sonido submarino de una instalación receptora de sónar, caracterizado porque el procedimiento presenta las siguientes etapas:
a) calcular una primera evolución de la marcación a partir de un número predeterminado k de ángulos de marcación determinados en último lugar,
b) calcular una segunda evolución…
Circuito de excitación y procedimiento para la alimentación de un LED así como medio de iluminación.
(10/10/2013) Circuito de excitación para la alimentación de al menos un LED (17a a 17c) con las siguientes caracterís-ticas:
a) una entrada de excitación para el suministro de una tensión alterna de red sinusoidal,
b) un circuito rectificador para la rectificación de la tensión alterna de red sinusoidal suministrada con la en-trada de excitación,
c) un circuito de corrección del factor de potencia con un condensador y con un medio de carga contro-lable para la carga del condensador con la tensión alterna de red sinusoidal rectificada en el circuito rectificador hasta una tensión de condensador en función de un control del medio…
Procedimiento y dispositivo para la especificación de un límite de corredor alrededor de un corredor que establece un área de permanencia y programa informático para la realización del procedimiento.
(09/10/2013) Procedimiento para la especificación de al menos un límite de corredor (U), que separa al menos un corredor(KF), en particular una vía marítima, que establece un área de permanencia, en particular admisible, para unvehículo, de al menos un área de entorno, en particular inadmisible, en el que el corredor (KF) comprende variassubáreas (F) que se solapan entre sí al menos parcialmente por parejas y en el que el límite de corredor (U) presentalímites de subárea (K) que limitan segmentos de límite de subárea (TA) de estas subáreas (F),
caracterizado por
las siguientes etapas de procedimiento para la especificación del límite de corredor (U):
1.1) determinar al menos una intersección (S), en particular al menos dos puntos de intersección, en cadacaso de al menos un límite de subárea (K) de al menos una subárea (F) con en cada caso al menos otrolímite de…
Vehículo submarino no tripulado y dispositivo para la conexión de un cable de fibra óptica a un vehículo submarino no tripulado.
(08/10/2013) Dispositivo de conexión para la conexión de un cable de fibra óptica a un vehículo submarino no tripulado,
caracterizado por
un cable de conexión, que es un cable de fibra óptica, y elementos de conexión en los respectivos extremos del cable de conexión para un cable de fibra óptica por un lado y para un vehículo submarino no tripu-lado por el otro, en el que el elemento de conexión para el cable de fibra óptica es un cuerpo flotante.
Antena submarina electroacústica.
(03/06/2013) Antena submarina electroacústica con un reflector y con elementos de resorte, que fijan el reflec-tor a un soporte de antena, en particular a un cuerpo de embarcación de un submarino, que se engan-chan al reflector cerca de sus bordes longitudinales superior e inferior, en la posición de montaje del reflec-tor, caracterizada porque los elementos de resorte presentan una corredera con elasticidad de resorte superior y una inferior, que se extienden en cada caso por la dimensión horizontal en la posición de montaje del reflector y presentan en cada caso un ala de colocación delantera para la colocación y fijación en el reflector y un ala de colocación trasera para la colocación y fijación en el soporte de ante-na, presentando la corredera superior un perfil aproximadamente en…
Procedimiento para generar rutas de localizador que jalonan la puntería.
(09/04/2013) Procedimiento para generar rutas de localización que jalonan la puntería, para varios objetivos que emiten ondassonoras, los cuales se localizan en una zona marítima, por varios sensores que presentan antenas receptoras hidroacústicas,en el que por cada sensor, para cada objetivo detectado, se suministra una ruta de sensor que se componede localizaciones sucesivas cronológicamente, y rutas de sensor de varios sensores que proceden de un objetivocomún, se fusionan en rutas de contactos que tan sólo contienen localizaciones del objetivo común, caracterizadoporque la fusión de las rutas de sensor se efectúa partiendo de rutas de sensor del sensor más preciso en una fusiónsecuencial ruta a ruta, se comprueban rutas de contacto desplazadas unas respecto a otras en el tiempo, encuanto a la probabilidad de su continuidad, y para ello a intervalos predeterminados…
Procedimiento y dispositivo para la determinación pasiva de datos de un objetivo.
(09/04/2013) Procedimiento para la determinación pasiva de datos de un objetivo (R, K, V) asociados a un objetivo, enparticular una distancia del objetivo, un rumbo del objetivo (K) y/o una velocidad del objetivo (V) a partir de ángulosde alineación medidos a través de recepción selectiva de la dirección de ondas acústicas irradiadas o emitidaspor el objetivo, por medio de una disposición de registradores de sonido acuático de una instalación de recepciónsonar y de ángulos de alineación estimados, que son determinados a partir de posiciones estimadas del objetivo,en el que por medio de al menos un procedimiento de optimización , designado a continuación comoprocedimiento CTMA, se reducen al mínimo iterativamente diferencias de ángulos de alineación a partir de losángulos de alineación medidos y a partir de los ángulos de alineación estimados…
Procedimiento para la detección de cuerpos móviles bajo el agua, transportados por el aire.
(12/06/2012) Procedimiento para la detección de cuerpos móviles bajo el agua, transportados por el aire, que tras recorrer una trayectoria aérea y/o de caída en el aire, se sumergen en el agua, en especial de torpedos ligeros, en el que las señales recibidas de un receptor electroacústico empleado para la vigilancia de su entorno en el agua, se someten a un procesamiento de señales dispuesto para la detección de un ruido de chapoteo (splash) producido, por la inmersión del cuerpo móvil bajo el agua, caracterizado porque en el procesamiento de señales se emplean medios del análisis wavelet discreto.
ANTENA SUBMARINA CON AL MENOS UN HIDRÓFONO Y CON UN CIRCUITO DE AMPLIFICACIÓN ELÉCTRICO ASOCIADO AL HIDRÓFONO.
(22/02/2012) Antena submarina con al menos un hidrófono y con un circuito de amplificación eléctrico simétrico, asociado al hidrófono , cuyo circuito presenta dos amplificadores de carga iguales, respectivamente, con una enterada de amplificación inversora y una entrada de amplificador no inversora, cuyas dos entradas de amplificador del mismo tipo están conectadas en potencial cero y dos entradas de amplificador del mismo tipo están conectadas en el hidrófono , caracterizada porque el hidrófono presenta dos elementos transductores electroacústicos conectados en serie y porque la conexión entre los elementos transductores están colocados en potencial cero
PROCEDIMIENTO Y DISPOSITIVO PARA TRANSMITIR EN SERIES CRONOLÓGICAS SEÑALES DE RECEPCIÓN DE TRANSDUCTORES ELECTROACÚSTICOS.
(10/02/2012) Procedimiento para transmitir en series cronológicas señales de recepción desde transductores electroacústicos, que se han situado en diferentes posiciones de transducción de un sistema de recepción espacialmente expandida, a una unidad de procesamiento de señales, en la que en cada posición de transducción se digitalizan las señales de recepción mediante un módulo electrónico, y las señales de recepción digitalizadas se conectan a la trama de un ritmo de sincronización en una línea de datos, que conduce a la unidad de procesamiento de señales, caracterizado por que en los módulos electrónicos se miden errores de sincronización-conexión inmanentes en relación con los instantes de conexión prefijados por la trama y se compensan en las posiciones de transducción por retardo de tiempo de las señales a conectar
PROCEDIMIENTO DE DETERMINACIÓN DE LA DIRECCIÓN PARA DETECTAR Y RASTREAR ÁNGULOS DE MARCACIÓN SUCESIVOS.
(30/01/2012) Procedimiento de determinación de la dirección para detectar y rastrear ángulos de marcación (Θ) sucesivos de objetivos emisores de sonido a través de todo el panorama azimutal o de un sector azimutal predeterminable con una antena de determinación de la dirección con una pluralidad de transductores electroacústicos u optoacústi- cos (2.1, 2.2, 2.n) para recibir ondas sonoras y generar señales de recepción, en el que, en cada ciclo de reloj y separadas por intervalos de tiempo, las señales de recepción, respectivamente, de todos o de un grupo de transductores son sumadas en fase después de un retardo de…
PROCEDIMIENTO PARA MARCAR UN OBJETIVO QUE EMITE SONIDO.
(02/12/2011) Procedimiento para marcar un objetivo que emite sonido mediante una antena submarina alongada que presenta varios transductores electroacústicos en el que a partir de las señales de recepción de los transductores se determina una marcación de objetivo (ßZk) horizontal de forma selectiva en cuanto a la dirección incluyendo una valor (cmess) fijado de la velocidad de sonido en el agua medido especialmente en el lugar de la antena, caracterizado por los siguiente paso del procedimiento: - con un modelo de propagación de sonido se calcula un recorrido de rayos de sonido en una dirección de propagación de sonido que coincide con una marcación de objetivo (ßZk) determinada, - a partir de recorrido de rayos de sonido se determina un ángulo de entrada de sonido (γk) en el lugar de antena para una…
PROCEDIMIENTO PARA DETERMINAR LA POSICIÓN MOMENTÁNEA DE UNA SECCIÓN ACÚSTICA DE UNA ANTENA REMOLCADA.
(13/05/2011) Procedimiento para la determinación de la posición momentánea de una sección acústica remolcada a una profundidad (ΔZ) de remolque elegida de una antena remolcada en el agua con la longitud (L) extendida por un vehículo remolcador, caracterizado porque la posición de la sección acústica se determina en al menos un lugar elegido de la sección acústica y porque la posición del lugar elegido es estimada después de un trayecto definido recorrido por el vehículo remolcador a lo largo de su trayectoria por medio de un modelo basado en las posiciones ocupadas por el vehículo remolcador y por el lugar elegido y en la posición del vehículo remolcador al final del trayecto teniendo…
DISPOSITIVO PARA DETERMINAR LA VELOCIDAD PROPIA DE UN VEHÍCULO ACUÁTICO.
(21/02/2011) Dispositivo para determinar la velocidad propia de un vehículo acuático por medición Doppler, que comprende al menos una antena (111 a 114) dispuesta en dicho vehículo acuático , cuya antena consta de un gran número de transductores electroacústicos yuxtapuestos de manera equidistante con una característica de emisión y recepción de banda ancha y, debido a la activación desfasada de los transductores , presenta una dirección principal para la emisión y recepción de ondas acústicas, la cual está inclinada según un ángulo (α) con respecto al plano abarcado por los ejes longitudinal y transversal del vehículo, estando distribuido el número total de transductores en varios grupos que pueden funcionar en paralelo y tienen…
MÉTODOS Y SISTEMAS PARA NAVEGAR BAJO EL AGUA.
(14/02/2011) Un método para determinar la posición absoluta bajo el agua de una embarcación sumergible que tiene un sistema de navegación de reconocimiento aislado o incomunicado, que no recibe información de posición desde el exterior de la embarcación, de tal manera que la embarcación recibe señales acústicas procedentes de una estación de referencia que tiene una posición absoluta conocida, y calcula su distancia de separación desde la estación de referencia, caracterizado por que se reciben señales procedentes de una estación de referencia en dos o más posiciones de la embarcación ; por que se obtienen datos de velocidad de cambio de la distancia (la velocidad de variación de distancia de separación) de la embarcación, a partir de dichas señales acústicas; y por que se calculan posiciones absolutas estimadas de la embarcación utilizando dicha…
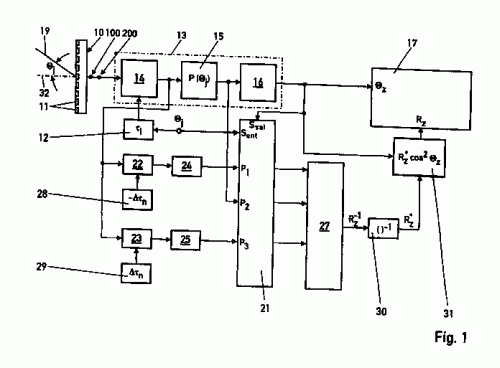
PROCEDIMIENTO PARA LA ESTIMACIÓN DE LA GEOMETRÍA DE ANTENA DE UNA ANTENA LINEAL ACÚSTICA.
(26/01/2011) Procedimiento para la estimación de la geometría de antena de una antena lineal submarina acústica que presenta una pluralidad de hidrófonos alineados uno tras otro a la misma distancia en un cordón, en el que con un número de formas geométricas de cordón potenciales por medio de un algoritmo evolutivo se determina una forma de cordón óptima como geometría de antena instantánea, caracterizado porque la forma de cordón es descrita por los ángulos (Θi) de hidrófono, donde cada ángulo (Θ i) de hidrófono asociado a un hidrófono se refiere a la posición del hidrófono precedente
(17/12/2010) Submarino no tripulado con un casco presurizado alrededor del cual fluye exteriormente el agua, con una cámara de popa dispuesta en el casco presurizado, en la que se han dispuesto y dimensionado medios de sustentación, que presentan al menos un cuerpo flotante, cuyo material posee una densidad, que es menor que la del agua, de tal modo que una fuerza ascensional, que actúa sobre los medios de sustentación, da lugar a una alineación casi horizontal del casco de presión en el agua, con un grupo propulsor y con al menos un aparato de equipamiento configurado como aparato incorporado o adosado, caracterizado porque la cámara de popa está inundada y al menos un aparato de equipamiento es un rollo de cable de transmisión de datos, instalado…
PROCEDIMIENTO Y DISPOSITIVO PARA LA DETERMINACION PASIVA DE DATOS DE UN OBJETIVO.
(14/06/2010) Procedimiento para la determinación pasiva de datos (Rest, vest, ?est) de un objetivo mediante recepción selectiva en dirección de ondas- sonoras, que son emitidas o enviadas por un objetivo (Z), con una disposición de receptores de ondas sonoras en el agua de una instalación de recepción de sonar, en particular sobre un vehículo portador , a partir de ángulos de marcación medidos (fca, ffa) hacia uno o varios objetivos (Z), en que en ciclos de tratamiento sucesivos es estimado por cada ciclo de tratamiento al menos un dato de objetivo (Rest; vest; ?est) a partir de ángulos de marcación medidos (fca, ffa), en que en la estimación de cada dato de objetivo entran ángulos…
APARATO PARA SOLTAR Y RASTREAR UN VEHICULO SUBMARINO NO TRIPULADO.
(19/06/2009) Aparato para soltar y rastrear un vehículo submarino no tripulado con un portador dispuesto en un extremo de un cable de sujeción , con un dispositivo de sujeción dispuesto en el portador para la sujeción del vehículo submarino , cuyo dispositivo tiene un elemento de sujeción controlable para desenganchar del dispositivo de sujeción el vehículo submarino , y con un dispositivo de rastreo dispuesto en el portador para la determinación acústica de la posición del vehículo submarino introducido en el agua , caracterizado porque el dispositivo de rastreo está dispuesto en un extremo del portador conformado en forma alargada, porque el portador en su zona longitudinal central está articulado de forma basculante en el cable de sujeción y porque está previsto un dispositivo de…
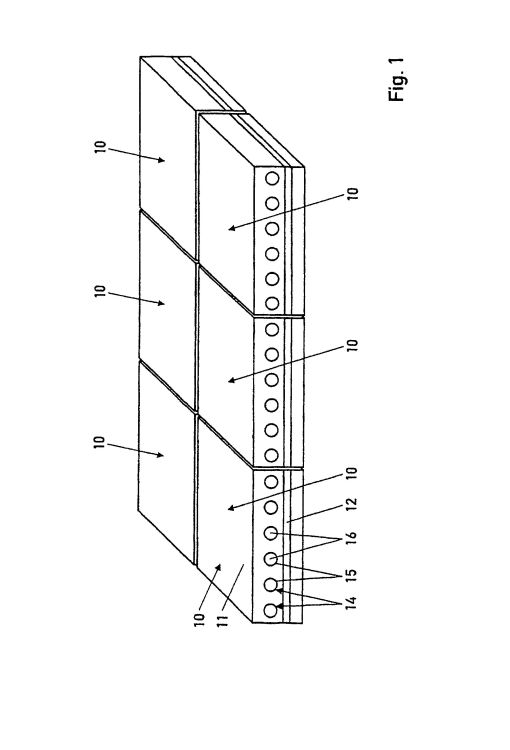
ANTENA SUBMARINA ELECTROACUSTICA.
Sección de la CIP Técnicas industriales diversas y transportes
(16/01/2009). Ver ilustración. Inventor/es: BRENNER, AXEL, BUSCH, RAINER. Clasificación: B63G8/39.
Antena submarina electroacústica, especialmente antena lateral susceptible de fijarse al forro exterior de vehículos submarinos, con hidrófonos ensartados uno tras otro y a una distancia fija de uno a otro en al menos una cavidad alargada, cerrada y cargada con un medio de relleno, caracterizada porque varias cavidades equipadas con hidrófonos se extienden en paralelo a distancia una de otra delante de una placa rígida a la presión y también a distancia de ésta, y porque la placa y las cavidades están incrustadas en un cuerpo de plástico acústicamente transparente y realizado a manera de panel.
DISPOSITIVO DE EXTRACCION PARA UNA ANTENA DE ARRASTRE SUBMARINA.
(01/05/2008) Dispositivo de extracción que se puede instalar en un vehículo acuático, especialmente submarino, para la bajada de una antena de arrastre submarina en forma de manguera, con un tambor de almacenamiento que recibe la antena de arrastre y que se puede accionar con motor para el arrollamiento y desenrollamiento de la antena de arrastre , y con una unidad de avance que incide en la antena de arrastre , que genera en la antena de arrastre una fuerza de tracción (FA) que actúa en la dirección de extracción, caracterizado porque la antena de arrastre está guiada sobre una rueda de guía que puede ser accionada con motor y porque está prevista una instalación de regulación , que sincroniza, durante la bajada, los motores de accionamiento del tambor de almacenamiento y la rueda de guía en adaptación a la fuerza de tracción…
PROCEDIMIENTO PARA LA DETERMINACION PASIVA DE DATOS DE UN OBJETIVO.
(01/05/2008) Procedimiento para la determinación pasiva de datos de un objetivo por recepción selectiva en dirección de ondas sonoras que son irradiadas o emitidas por el objetivo, con una disposición de transductores electroacústicos de una instalación de recepción sobre un vehículo portador, a partir de ángulos de marcación estimados, que se obtienen a partir de posiciones estimadas del objetivo, y de ángulos de marcación medidos, minimizándose iterativamente la diferencia entre ángulos de marcación medidos y estimados, caracterizado porque se prefijan valores límite para la distancia y/o el rumbo y/o la velocidad del objetivo a fin de obtener condiciones marginales, y porque…
PROCEDIMIENTO PARA OBSERVAR UN GRAN NUMERO DE OBJETOS.
(01/11/2007) Procedimiento para observar un gran número de objetos que en un espacio vigilado por varios sensores son captados y seguidos por los sensores, en el que se forman rastreos de sensor a partir de datos de los objetos captados y se actualizan los rastreos de los sensores a intervalos de tiempo y se agrupan rastreos de sensores diferentes para obtener rastreos del sistema que representan los respectivos objetos, caracterizado porque todos los rastreos de sensores se consideran como pertenecientes a uno o varios rastreos del sistema y se asignan a éstos y en cada rastreo del sistema se presentan todos los rastreos de sensor asignados en tanto que no pueda tomarse con seguridad una decisión de la no pertenencia al objeto representado por el respectivo…
PROCEDIMIENTO PARA LA LOCALIZACION PASIVA DE OBJETIVOS IRRADIADORES DE SONIDO.
Sección de la CIP Física
(01/01/2006). Ver ilustración. Inventor/es: NIRMAIER, THOMAS. Clasificación: G01S3/808, G10K11/34.
Procedimiento para la localización pasiva de objetivos irradiadores de sonido mediante la determinación de un ángulo de marcación con respecto al objetivo y una distancia del objetivo empleando una disposición de transductores que cubre un sector de recepción y que lleva transductores electroacústicos distanciados uno de otro, en el que se enfoca la disposición de transductores mediante desplazamientos de fase y/o retardos de tiempo definidos de sus señales de recepción sobre puntos focales supuestos uno tras otro en la dirección de marcación a distancias diferentes de la disposición de transductores y se forman señales de foco asociadas a los puntos focales mediante una adición congruente en fase de las señales de recepción retardadas.
PROCEDIMIENTO PARA LA LOCALIZACION PASIVA DE OBJETOS IRRADIADORES DE SONIDO.
(16/12/2005) Procedimiento para la localización pasiva de objetivos irradiadores de sonido empleando una disposición de transductores que cubre un sector de recepción y que lleva transductores electroacústicos distanciados uno de otro, en el que la disposición de transductores es enfocada mediante un desplazamiento de fase y/o un retardo de tiempo definidos de sus señales de recepción sobre puntos focales supuestos que están enfilados uno tras otro sobre rayos de marcación , y mediante una suma congruente en fase de las señales de recepción retardadas se forman señales de foco asociadas a los puntos focales , caracterizado porque se determinan para cada rayo de marcación…
{kind=link}
{kind=link}