CIP-2021 : A47L 9/28 : Montaje del equipo eléctrico, p. ej. adaptación o fijación al aspirador;
Control de los aspiradores por medios eléctricos.
CIP-2021 › A › A47 › A47L › A47L 9/00 › A47L 9/28[1] › Montaje del equipo eléctrico, p. ej. adaptación o fijación al aspirador; Control de los aspiradores por medios eléctricos.
A NECESIDADES CORRIENTES DE LA VIDA.
A47 MOBILIARIO; ARTICULOS O APARATOS DE USO DOMESTICO; MOLINILLOS DE CAFE; MOLINILLOS DE ESPECIAS; ASPIRADORES EN GENERAL.
A47L LAVADO O LIMPIEZA DOMESTICA (cepillos A46B; limpieza de grandes cantidades de botellas o de otros objetos huecos de una sola especie B08B 9/00; lavado de la ropa D06F ); ASPIRADORES EN GENERAL (limpieza en general B08).
A47L 9/00 Partes constitutivas o accesorios de aspiradores, p. ej. medios mecánicos para controlar la aspiración o para producir una acción de batido; Dispositivos para la conservación ordenada de los aspiradores o de sus piezas; Vehículos portadores especialmente concebidos para los aspiradores.
A47L 9/28 · Montaje del equipo eléctrico, p. ej. adaptación o fijación al aspirador; Control de los aspiradores por medios eléctricos.
CIP2021: Invenciones publicadas en esta sección.
Aparato de limpieza, así como accesorio para la unión a un dispositivo de base del aparato de limpieza.
(17/06/2020) Accesorio configurado como un cepillo de alfombra o como un accesorio de suelo duro para una aspiradora o como un accesorio de limpieza en mojado para un aparato de limpieza en mojado para la unión a una zona de conexión de un dispositivo de base de un aparato de limpieza , especialmente para la unión a una zona de conexión de un dispositivo de base de una aspiradora doméstica, pudiéndose modificar un parámetro de funcionamiento del dispositivo de base , especialmente una potencia de soplado de un ventilador del dispositivo de base , en dependencia de una información del accesorio , caracterizado por que el accesorio presenta un dispositivo de control…
(17/06/2020). Solicitante/s: IROBOT CORPORATION. Inventor/es: MORIN,RUSSELL WALTER, BOESCHENSTEIN,HAROLD, SWETT,DAVID ORRIN, JONAS,JUDE ROYSTON.
Un robot móvil que comprende:
un cuerpo configurado para atravesar una superficie y recibir residuos desde la superficie; y
un depósito de residuos dentro del cuerpo, comprendiendo el depósito de residuos:
una cámara para contener los residuos recibidos por el robot móvil;
un orificio de escape a través del cual los residuos salen del depósito de residuos, estando el orificio de escape en una parte inferior del depósito de residuos;
una unidad de compuerta que comprende una tapa configurada para moverse, en respuesta a una presión de aire en el orificio de salida, entre una posición cerrada para cubrir el orificio de escape y una posición abierta para abrir un trayecto entre la cámara y el orificio de escape;
caracterizado por que la unidad de compuerta, que incluye la tapa en la posición abierta y en la posición cerrada, está por encima de una superficie inferior del cuerpo.
PDF original: ES-2818116_T3.pdf
Aparato de limpieza de suelos y procedimiento de funcionamiento del mismo.
(29/04/2020) Procedimiento de funcionamiento de un aparato de limpieza de suelos , por ejemplo un aspirador de polvo manualmente guiado, que comprende al menos un motor de limpieza eléctricamente accionado y maniobrable en diferentes modos de funcionamiento, uno o varios elementos de mando para ingresar manualmente una consigna de funcionamiento por el usuario y un dispositivo de control electrónico en el que está archivada al menos una vinculación lógica de la al menos una consigna de funcionamiento con uno de los modos de funcionamiento, en el que se varía la al menos una vinculación lógica con un aparato universal de visión y entrada de datos unido con el aparato de limpieza de suelos a través de un trayecto de transmisión de datos , caracterizado por que…
Sistema y un procedimiento para la limpieza de un suelo con un robot de limpieza.
(22/04/2020). Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Inventor/es: KOETZ,HENDRIK.
Sistema para la limpieza de un suelo
- con al menos un robot de limpieza y
- con medios de control para el control del robot de limpieza ,
caracterizado por
- medios de comunicación para el registro de al menos un fenómeno con elevada concurrencia de suciedad al menos de una parte del suelo,
- ajustando los medios de control , en función de la intensidad de al menos un fenómeno con elevada concurrencia de suciedad, la intensidad de la acción del robot de limpieza para la limpieza al menos de una parte del suelo.
PDF original: ES-2790745_T3.pdf
Aparato de tratamiento de suelos dotado de traslación automática.
(04/03/2020). Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Inventor/es: KOETZ,HENDRIK, HAHN,PIA.
Aparato de tratamiento de suelos dotado de traslación automática, especialmente robot de limpieza, que comprende un elemento de tratamiento de suelos , al menos dos ruedas motorizadas y un dispositivo de detección para reconocer una clase de suelo de una superficie a tratar, presentando el dispositivo de detección un elemento de resistencia de fricción , caracterizado por que el elemento de resistencia de fricción contacta con la superficie durante un desplazamiento de modo que una resultante de fuerzas ataque en el aparato de tratamiento de suelos fuera de un eje de referencia , estando orientado el eje de referencia en sentido paralelo a una dirección de movimiento principal del aparato de tratamiento de suelos prefijada por la orientación de las ruedas y estando dicho eje de referencia centrado entre las ruedas , referido a una dirección perpendicular al mismo.
PDF original: ES-2777791_T3.pdf
Robot de limpieza con un dispositivo para detectar una colisión.
(26/02/2020) Aparato de tratamiento de superficies dotado de movilidad automática, especialmente robot de limpieza, que comprende una carcasa y un dispositivo de detección de colisiones para detectar una colisión del aparato de tratamiento de superficies con un obstáculo, en el que el dispositivo de detección de colisiones presenta al menos un sensor de contacto sensible a toques y en el que el sensor de contacto sensible a toques es un sensor de contacto vertical que está dispuesto en la carcasa del aparato de modo que su zona de detección, en presencia de una orientación usual del aparato de tratamiento de superficies durante un desplazamiento del mismo, esté orientada en sentido vertical, con…
Aparato electrodoméstico y procedimiento para el funcionamiento de un aparato electrodoméstico.
(05/02/2020) Aparato electrodoméstico , que comprende:
- al menos un acumulador de energía eléctrica diseñado para alimentar con potencia eléctrica al menos un consumidor del aparato electrodoméstico ,
- al menos un equipo de control con al menos una unidad de control diseñada para el control de la salida de potencia al consumidor en función del nivel de potencia configurado,
- estando predefinido, para el funcionamiento del consumidor con un primer nivel de potencia, un primer tiempo de funcionamiento nominal en función de un estado de carga de referencia del acumulador de energía eléctrica ,
- comprendiendo el equipo de control al menos una unidad de detección diseñada para la detección del estado de carga del acumulador de energía eléctrica , y
- comprendiendo el…
Estación de carga, especialmente para un aparato de limpieza.
(29/01/2020) Estación de carga , especialmente para un aparato de limpieza , que comprende una carcasa de dicha estación, un elemento de acometida de la red, especialmente un enchufe de red, para conectar la estación de carga a un suministro de tensión eléctrica , un dispositivo de carga y al menos un elemento de carga para transferir energía a un acumulador eléctrico, en la que la carcasa de la estación presenta al menos dos partes de carcasa trasladables una con relación a otra, de las cuales una primera parte de la carcasa presenta el elemento de acometida de la red y de las cuales una segunda parte de la carcasa presenta el elemento de carga , con lo que el elemento de carga puede ser trasladado, por efecto de una traslación de una de las partes de la carcasa, con relación al elemento…
Sistema de limpieza de pisos autónomo.
(22/01/2020) Un sistema de limpieza de pisos autónomo, que comprende:
un robot de aspiración en seco para generar un flujo de aire de trabajo para eliminar la suciedad de una superficie que se va a limpiar y almacenar la suciedad en un espacio de recolección, donde el robot de aspiración en seco comprende, además:
un sistema de accionamiento para mover de forma autónoma el robot de aspiración en seco sobre la superficie que se va a limpiar ;
un sistema de detección de manchas para detectar una mancha ; y
un sistema de despliegue de baliza para desplegar selectivamente una baliza en la ubicación de la mancha ;
un robot de limpieza profunda para almacenar un fluido de limpieza y suministrar el fluido de limpieza a la superficie que se va a limpiar , y para retirar el fluido de limpieza y los escombros…
Sistema de carga eléctrica de una maquina autónoma.
(01/01/2020). Solicitante/s: ETESIA (SOCIETE PAR ACTIONS SIMPLIFIEE). Inventor/es: WOLF,PIERRE, TREGER,CLAUDE, DELCASSO,LAURENT.
Borne de carga con acceso circunferencial para la alimentación de máquinas autónomas del tipo robots de tratamiento o de corte de césped, caracterizado por que incluye una envolvente o una cajera de protección que presenta, al menos al nivel de la zona del primer par de terminales (4, 4'), una forma exterior de revolución, presentando cada uno de los terminales (4 y 4') del primer par una forma exterior sensiblemente circular y que se extiende circunferencialmente siendo prominente, nivelada o retranqueada con respecto a la superficie exterior de la citada envolvente o de la citada cajera , para una accesibilidad de 360º.
PDF original: ES-2780179_T3.pdf
Procedimiento para controlar la caminata de un robot, y el robot.
(01/01/2020) Un procedimiento para controlar la caminata de un robot, efectuado por un procesador en el robot y que comprende:
controlar (S101) el robot para que camine a lo largo de las paredes de una habitación para obtener una estructura y un tamaño de la habitación;
dividir (S102) un área de la habitación en una pluralidad de áreas de barrido regulares y una pluralidad de áreas de barrido irregulares según la estructura y el tamaño de la habitación, donde un tamaño del área de barrido irregular es menor que un tamaño del área de barrido regular;
controlar (S103) el robot para que barra la pluralidad de áreas de barrido regulares en un modo de caminata de barrido con forma de gancho, donde el modo de caminata de barrido con forma de gancho comprende…
Aparato de limpieza, especialmente aspirador de polvo doméstico.
(01/01/2020). Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Inventor/es: VARNHORST, MATHIAS, ERNER,THOMAS, FRITSCH,MATTHIAS, SARPASAN,MUSTAFA.
Aparato de limpieza , especialmente aspirador de polvo doméstico, que comprende un soplante y un sensor de presión para detectar una depresión generada por el soplante , siendo el sensor de presión un sensor de presión absoluta; caracterizado por un equipo de evaluación y regulación que está preparado para regular una potencia de aspiración resultante del aparato de limpieza en función de una depresión detectada por medio del sensor de presión , una potencia actual del soplante y un número de revoluciones actual del soplante.
PDF original: ES-2769776_T3.pdf
Aspirador portátil ciclónico.
(25/12/2019). Solicitante/s: SEB S.A.. Inventor/es: MARCHAL,ERIC, THOUK,DADANO.
Aspirador portátil ciclónico que comprende:
- un cuerpo principal ,
- un circuito de aire que comprende una entrada de aire de aspiración y una salida de aire ,
- un recinto ciclónico solidario del cuerpo principal , y dispuesto para separar impurezas de un flujo de aire que recorre el circuito de aire,
en el cual el cuerpo principal y el recinto ciclónico presentan cada uno una base,
la base del cuerpo principal que comprende una superficie inferior principal y medios de apoyo que forman un plano de apoyo del aspirador para reposar sobre un soporte plano,
la base del recinto ciclónico que está desplazada del plano de apoyo, de modo que solo los medios de apoyo de la base del cuerpo principal reposan sobre el soporte plano, caracterizado por que los medios de apoyo comprenden dos nervios laterales (16a, 16b) longitudinales dispuestos en cada lado de la superficie inferior principal de la base del cuerpo principal.
PDF original: ES-2768104_T3.pdf
Boquilla de aspiración para un aspirador de polvo.
(27/11/2019) Boquilla de aspiración para un aspirador de polvo destinado a aspirar material aspirable de una superficie a limpiar por medio de una corriente de aire aspiración, en la que la boquilla de aspiración presenta una boca de aspiración que puede disponerse al lado de la superficie a limpiar y está provista de un borde de aspiración que limita una superficie parcial solicitada por la corriente de aire de aspiración, así como de una abertura de extracción de la corriente de aire de aspiración, y cuya boquilla de aspiración presenta también un medio de limitación asociado al borde de aspiración , el cual puede ser controlado en función de un resultado de detección…
Monitorización de residuos.
(20/11/2019) Un sistema de monitorización de residuos para un robot de cobertura autónomo, que comprende:
un receptáculo que define una abertura rectangular para recibir residuos en el receptáculo , teniendo la abertura una parte superior y una parte inferior, estando la parte superior por encima de la parte inferior a medida que los residuos se reciben en el receptáculo ;
un primer y segundo emisor (756, 804A, 804B) dispuestos en lados opuestos de la abertura , cada uno dispuesto de modo que emita una señal a través de al menos una parte de la abertura , caracterizado por un primer receptor (760; 802A) próximo al primer…
(20/11/2019). Solicitante/s: EUROFILTERS HOLDING N.V. Inventor/es: SAUER, RALF, SCHULTINK, JAN.
Robot aspirador que comprende una base apoyada sobre ruedas , un separador de polvo y una tobera de suelo , dispuesta en la base, para absorber una corriente de aire al robot aspirador , donde la tobera de suelo está realizada con altura ajustable con respecto a la base,
donde la tobera de suelo se puede llevar a una posición inclinada con respecto a la base,
donde la tobera de suelo está articulada a la base de manera pivotable,
donde la tobera de suelo presenta una placa de suelo con una superficie base que durante el funcionamiento del robot aspirador está dirigida hacia la superficie que ha de limpiarse, donde la placa de suelo presenta en la superficie base un canal de corriente de aire a través del cual el aire que ha de limpiarse entra en la tobera de suelo, donde el robot aspirador comprende un motor paso a paso o un servomotor para el ajuste de la altura de la tobera de suelo con respecto a la base.
PDF original: ES-2769800_T3.pdf
Dispositivo de carga de robot limpiador y método para ensamblar un robot limpiador al dispositivo de carga.
(20/11/2019) Un dispositivo de carga de un robot limpiador, comprendiendo el dispositivo de carga:
un cuerpo principal que comprende una unidad de terminal 5 configurada para cargar el robot limpiador,
definiendo el cuerpo principal un aspecto exterior;
una unidad generadora de señal de inducción dispuesta en un lado del cuerpo principal y dispuesto para transmitir una señal de inducción de retorno al robot limpiador; y un miembro de guía de señal de inducción dispuesto en un lado de la unidad generadora de señal de inducción y dispuesto para incrementar el rendimiento de ensamblaje del robot limpiador mejorando la linealidad de la señal…
Sistema con al menos dos aparatos de limpieza.
(20/11/2019) Sistema con al menos dos aparatos de limpieza , en el que al menos uno de los aparatos de limpieza puede ser trasladado con relación a otro aparato de limpieza , en el que los aparatos de limpieza presentan sendos enlaces de comunicación con un dispositivo de control común , y en el que el dispositivo de control es un dispositivo de control central del sistema que está construido fuera de los aparatos de limpieza y en el que están registrados los aparatos de limpieza , caracterizado por que el dispositivo de control central está disponible aún cuando los aparatos de limpieza estén desconectados, estando preparado también el dispositivo de control para, dependiendo de una demanda de servicio de un componente del primer aparato de limpieza y dependiendo de un estado…
Aparato de limpieza por aspiración.
(07/08/2019). Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Inventor/es: SERNECKI,MIRON.
Aparato de limpieza por aspiración , especialmente robot de aspiración, que presenta un soplante para transportar material aspirado desde una superficie a limpiar hasta una cámara de material aspirado y un acumulador eléctrico con uno o varios elementos para el funcionamiento del soplante , en el que el calor generado por el acumulador eléctrico puede ser evacuado por una corriente de aire generada por el soplante y en el que, además, el acumulador eléctrico forma con una carcasa del mismo una unidad modular dispuesto en el aparato de limpieza por aspiración , que forma al mismo tiempo una sección de un canal de flujo para la corriente de aire, con lo que la corriente de aire puede ser transportada a través de la unidad modular , caracterizado por que la unidad modular está dispuesta en un lado de aspiración del soplante.
PDF original: ES-2748431_T3.pdf
Aparato de limpieza por aspiración así como procedimiento para el funcionamiento de un aparato de limpieza por aspiración.
(26/06/2019). Ver ilustración. Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Inventor/es: MEGGLE,MARTIN, SERNECKI,MIRON.
Procedimiento para hacer funcionar un aparato de limpieza por aspiración , en particular un robot de aspiración, eliminándose durante una operación de aspiración material de aspiración por medio de un ventilador del aparato de limpieza por aspiración de una superficie que va a limpiarse y haciéndose funcionar el ventilador por medio de un acumulador , enfriándose el acumulador durante una operación de carga del acumulador por un flujo de aire generado por el ventilador , caracterizado por que en una operación de carga del acumulador con respecto al sentido de flujo del flujo de aire transportado por el ventilador se abre una abertura de aire secundario dispuesta delante del acumulador , de modo que el acumulador se enfría por el aire secundario que entra a través de la abertura de aire secundario en el aparato de limpieza por aspiración.
PDF original: ES-2745212_T3.pdf
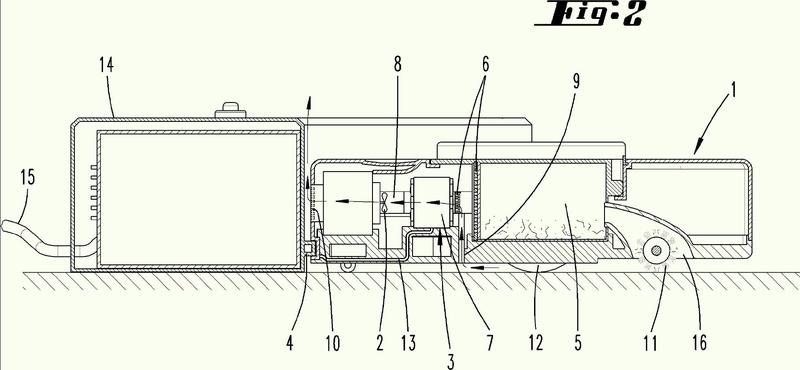
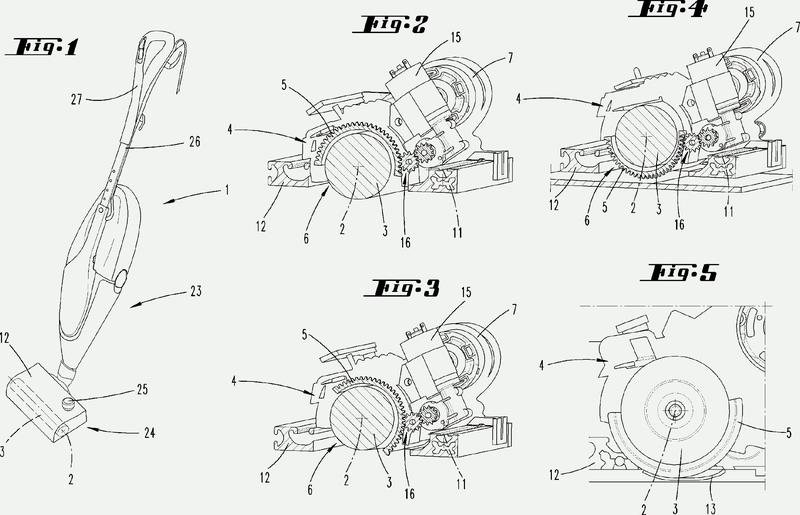
Aparato de limpieza en húmedo con un rodillo de limpieza.
(26/06/2019). Ver ilustración. Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Inventor/es: BLUM, MICHAEL, ZABBACK,IRIS, JENTSCH,JOCHEN.
Aparato de limpieza en húmedo , especialmente aparato de fregado en húmedo, que comprende un rodillo de limpieza montado de manera giratoria alrededor de un eje de rodillo y una cubierta de rodillo que rodea al menos parcialmente al rodillo de limpieza en dirección circunferencial y que presenta al menos un elemento de cubierta trasladable para cerrar y/o abrir discrecionalmente una zona de abertura de la cubierta del rodillo, caracterizado por que el elemento de cubierta y el eje del rodillo están unidos operativamente uno con otro a través de un engranaje que une el eje del rodillo con un accionamiento del rodillo de tal manera que, para variar la velocidad de rotación del rodillo de limpieza , se pueda conmutar el engranaje , por efecto de una traslación del elemento de cubierta , para pasar de una primera etapa de engranaje a una segunda etapa de engranaje , o viceversa.
PDF original: ES-2797984_T3.pdf
(22/05/2019). Solicitante/s: LG ELECTRONICS INC.. Inventor/es: KIM, SUNG-GUEN, KIM,BONG-JU, SHIM,IN-BO, SUNG,JI-HOON, YIM,BYUNG-DOO.
Un robot limpiador que comprende:
un cuerpo principal en el que se dispone la unidad de succión de polvo ;
soportes dispuestos en ambos lados de la unidad de succión de polvo; y
un agitador instalado en los soportes para eliminar sustancias extrañas de un área de trabajo, caracterizado por que el agitador comprende un eje de fijación que tiene una forma no circular y que proporciona un centro de rotación, y uno de los soportes incluye una parte de inserción de eje en la que se inserta el eje de fijación , en donde la parte de inserción de eje está rebajada en una forma para corresponder a la del eje de fijación para permitir que el eje de fijación que está alojado a ella, rote junto con la parte de inserción de eje en acoplamiento,
en donde el eje de fijación tiene una forma oval o poligonal cilíndrica.
PDF original: ES-2734382_T3.pdf
Dispositivo ecológicamente eficiente para la aspiración de polvo.
(17/05/2019) Dispositivo para aspirar que comprende un aparato aspirador con una potencia de entrada inferior a 1200 W y una bolsa de filtro con un grado de separación del material de bolsa de filtro superior al 60%, presentando el dispositivo para aspirar un factor de calidad con bolsa de filtro sin llenar QW un definido por
QW un = (hsaug un / hfbar un) x Ψ con
hsaug un: presión negativa, según la norma EN 60312, del dispositivo para aspirar con bolsa de filtro sin llenar en [kPa],
hfbar un: presión negativa en el espacio de alojamiento de bolsa de filtro con bolsa de filtro sin llenar en [kPa], y
Ψ: grado de separación del material de bolsa de filtro en [%],
que es superior a 25; preferentemente,…
Dispositivo ecológicamente eficiente para la aspiración de polvo.
(17/05/2019) Dispositivo para la aspiración de polvo que comprende un aparato aspirador con una potencia de entrada media inferior a 1200 W y una bolsa de filtro con un grado de separación del material de la bolsa de filtro superior al 60 %, presentando el dispositivo para la aspiración de polvo un factor de calidad con la bolsa de filtro vacía QA vac definido por:
QA vac = (Paspiración vac / Pel vac x Ψ con
Paspiración vac: potencia de aspiración del dispositivo para la aspiración de polvo con la bolsa de filtro vacía en [W],
Pel vac: potencia de entrada eléctrica de la unidad de motor-ventilador del dispositivo para la aspiración de polvo con la bolsa de filtro vacía en [W], y
Ψ: grado de separación del material de la bolsa de filtro en [%]
que es superior a 7, preferentemente…
Robot autónomo de limpieza de superficies.
(16/05/2019) Un robot móvil de limpieza de suelos que comprende:
un cuerpo de robot que define una dirección (F) de accionamiento hacia delante;
un sistema de accionamiento que soporta el cuerpo de robot para maniobrar el robot a través de una superficie , comprendiendo el sistema de accionamiento ruedas de accionamiento derecha e izquierda (124a, 124b) dispuestas en las partes derecha e izquierda correspondientes del cuerpo de robot; y
un conjunto de limpieza dispuesto sobre el cuerpo de robot, comprendiendo el conjunto de limpieza:
un soporte de almohadilla dispuesto delante de las ruedas motrices (124a, 124b) y que tiene…
Aspiradora y mango para una aspiradora.
(01/05/2019) Un mango de aspiradora, que comprende:
una tubería configurada para transferir al menos uno de aire, polvo, y materia extraña a una unidad de accionamiento que genera una fuerza de aspiración;
una porción de agarre conectada a la tubería, y conformada para ser agarrada por un usuario; una unidad sensora situada en la porción de agarre para detectar información relacionada con si la porción de agarre es agarrada o no por el usuario; y
un controlador configurado para controlar la unidad de accionamiento en base a la información detectada,
caracterizado por que la unidad sensora comprende:
un sensor de temperatura configurado para detectar una temperatura de una parte de una superficie exterior de la porción de agarre, y
un sensor de presión configurado…
Limpieza autónoma de suelos con una almohadilla extraíble.
(30/04/2019) Un robot autónomo de limpieza de suelos, que comprende:
un cuerpo de robot que define una dirección de accionamiento hacia delante;
un controlador soportado por el cuerpo de robot;
un accionamiento que soporta el cuerpo de robot y configurado para maniobrar el robot a través de una superficie en respuesta a comando del controlador;
un soporte de almohadilla dispuesto en una parte inferior del cuerpo de robot y configurado para retener una almohadilla de limpieza extraíble (120; 600; 700; 800A-800F) durante el funcionamiento del robot de limpieza; y caracterizado por que el robot autónomo de limpieza de suelos comprende además:
un sensor de almohadilla dispuesto para detectar una característica de una almohadilla de limpieza sostenida…
ROBOT ASPIRADOR CON SISTEMA DE FREGADO INTELIGENTE.
(17/04/2019). Solicitante/s: Cecotec Research and Development. Inventor/es: ORTS,José, ORTS,César.
1. Robot aspirador con sistema de fregado inteligente comprendido por, un bastidor desplazable, medios de desplazamiento autónomo o semi autónomo , medios de limpieza , medios de filtrado del aire, medios de aspiración, medios de fregado con al menos un depósito de agua , y al menos una mopa , y un circuito de circulación del aire aspirado, caracterizado por tener un sensor de humedad en la mopa , un sensor de llenado en el depósito , y un regulador de caudal de líquido entregado desde el depósito.
PDF original: ES-1228474_U.pdf
Robot y método para controlar el robot.
(03/04/2019). Solicitante/s: LG ELECTRONICS INC.. Inventor/es: CHUNG,MOON KEE, REW,HO SEON, PARK,JONG IL, JUNG,YOUNG GYU.
Un robot de limpieza que comprende:
una carcasa ;
un primer parachoques conectado a la carcasa , estando el primer parachoques configurado para detectar un obstáculo que va a ser evitado y;
caracterizado por
un segundo parachoques que está configurado para detectar y discriminar un obstáculo superable sobre el cual el robot está configurado para pasar.
PDF original: ES-2731590_T3.pdf
APARATO AUTO-DESPLAZABLE DE LIMPIEZA.
(12/03/2019) 1. Aparato auto-desplazable de limpieza que comprende al menos
un bastidor desplazable con respecto a una superficie,
medios de desplazamiento autónomo o semi-autónomo, medios de limpieza y medios de aspiración,
y un sistema de control conectado operativamente a los medios de desplazamiento;
en el que el sistema de control está configurado para hacer funcionar el aparato en uno o varios modos de funcionamiento y/o comportamiento sucesivos y/o alternativos caracterizado porque comprende al menos un primer modo de funcionamiento en el que los medios de aspiración tienen una potencia de succión variable.
2. Aparato, según la reivindicación 1, caracterizado porque el primer modo de…
Aparato de tratamiento de una superficie.
(06/03/2019). Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Inventor/es: HILLEN,LORENZ, BRANDT,MARA.
Aparato de tratamiento de una superficie , especialmente robot de limpieza, que presenta un dispositivo de detección para reconocer la naturaleza de la superficie , cuyo dispositivo de detección presenta una fuente de luz para irradiar la superficie con luz y un sensor para detectar la luz reflejada por la superficie , caracterizado por que el sensor lleva asociada una corredera de diafragma tridimensional que forma varios volúmenes parciales , estando asociado cada volumen parcial a una superficie parcial distinta del sensor y estando separadas ópticamente una de otra las superficies parciales contiguas del sensor por medio de la corredera de diafragma de modo que se impida un paso de luz de un primer volumen parcial a un segundo volumen parcial.
PDF original: ES-2715561_T3.pdf
Robot que sigue la pared.
(27/02/2019) Un robot que comprende:
un cuerpo que puede moverse con respecto a una superficie ;
un parachoques montado en el cuerpo para permitir el movimiento del parachoques con respecto al cuerpo, pudiendo moverse el parachoques entre una posición no comprimida con respecto al cuerpo y una posición comprimida con respecto al cuerpo;
un primer sensor (112R) para producir una primera señal en respuesta al movimiento del parachoques con respecto al cuerpo provocado por el contacto entre el parachoques y la superficie, variando linealmente la primera señal con el movimiento del parachoques con respecto al cuerpo; y un controlador configurado para controlar el movimiento del cuerpo para hacer que el cuerpo rastree la superficie basándose en un valor (X), basándose…
{kind=link}
{kind=link}