CIP-2021 : G01B 11/03 : mediante la medida de coordenadas de puntos.
CIP-2021 › G › G01 › G01B › G01B 11/00 › G01B 11/03[2] › mediante la medida de coordenadas de puntos.
G FISICA.
G01 METROLOGIA; ENSAYOS.
G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS.
G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00).
G01B 11/03 · · mediante la medida de coordenadas de puntos.
CIP2021: Invenciones publicadas en esta sección.
APARATO ASISTENTE DE LA ESTACIÓN TOTAL PARA LA MEDICIÓN CON OBSTÁCULOS, APLICADO A TOPOGRAFÍA.
(04/06/2020). Solicitante/s: GÓMEZ PALACIO, Sergio. Inventor/es: GÓMEZ PALACIO,Sergio.
La presente invención se refiere a un dispositivo o aparato asistente de la estación total en topografía, el cual es usado para la medición con obstáculos, en donde dicho aparato consta básicamente de una base de fijación que permite sujetar el aparato de manera firme a un trípode, una base nivelante que permite la nivelación del aparato y corresponde al mismo componente de los tránsitos o teodolitos, y un cuerpo principal constituido principalmente por unos discos de medición angular, tanto horizontal como vertical, y por una burbuja de nivelación, en donde dicho cuerpo además comprende un espejo que refleja un rayo láser y una plomada que permite determinar un punto del terreno donde se lleva a cabo la medición.
Sistema de corrección de alineación y métodos de uso del mismo.
(06/05/2020) Un sistema de corrección de alineación que comprende
(a) una base que tiene una superficie base con una o más ubicaciones objetivo, en donde cada ubicación objetivo está equipada para recibir un objeto reflectante de luz;
(b) uno o más objetos reflectantes de luz , cada uno colocado en una de las ubicaciones objetivo; y
(c) un brazo robótico cartesiano con una sonda que está fijada a este de manera removible o permanente, en donde la sonda es una fuente de luz y un sensor para detectar la luz reflejada, la sonda colocada dentro de un plano de sonda sustancialmente paralelo a un plano de la base y a una distancia del plano de la base, en…
Sistema de control de navegación para un dispositivo robótico.
(28/03/2018) Un dispositivo robótico de limpieza que comprende:
un chasis y un armazón externo asegurado al chasis que define una cubierta estructural de una altura que facilita el movimiento del dispositivo robótico de limpieza por debajo de los muebles;
unos conjuntos izquierdo y derecho de ruedas motrices principales (112L, 112R) y unos motores eléctricos independientes (114L, 114R) respectivos, montados de manera independiente en combinación con el chasis que se desplaza con el pivotamiento permitido, para un movimiento pivotante con respecto a este en extremos opuestos del diámetro transversal del chasis , y que se puede mover entre una posición retraída, sometida al peso del dispositivo robótico de limpieza durante su funcionamiento, y una posición extendida, donde…
Procedimiento para la medición de espesores y volúmenes de hormigón proyectado en taludes de nueva construcción, reforzados con bulones, mediante datos Lidar terrestre.
(23/01/2018). Solicitante/s: UNIVERSIDAD DE VIGO. Inventor/es: GONZALEZ JORGE,HIGINIO, ARIAS SANCHEZ,PEDRO, MARTÍNEZ SÁNCHEZ,Joaquín, PUENTE LUNA,Ivan.
La presente invención describe un procedimiento para la obtención de modo semi-automático, del espesor puntual, promedio y el volumen real del hormigón proyectado sobre un talud bulonado de nueva construcción. Comprende un sistema LiDAR terrestre, responsable de la captura de los datos del talud, un sistema de referencia a través de bulones que permite el registro de ambos modelos físicos y un programa que realiza el cálculo de los espesores puntuales, promedio y volúmenes asociados.
PDF original: ES-2650964_A1.pdf
Aparato de ajuste de herramienta y medición.
(19/07/2017) Sistema con un aparato de ajuste de herramienta y medición para medir una unidad de herramienta , con al menos un dispositivo de cámara que está configurado para captar información de la unidad de herramienta , con una unidad de cálculo que está configurada para al menos por medio de la información generar un conjunto de datos de al menos una parte de la unidad de herramienta , y con una unidad de procesamiento adicional digital que está configurada para proporcionar el conjunto de datos en forma digital para un procesamiento adicional a máquina, estando configurada la unidad de cálculo para, al menos por medio de la información captada por el dispositivo de cámara , generar un conjunto de datos de un registro aproximado al menos de una parte de la unidad de herramienta , describiendo el conjunto de datos determinado…
Método y dispositivo para medir la distorsión óptica causada por un objeto.
(26/10/2016) Un método para medir la distorsión óptica de un objeto, comprendiendo el método:
mapear una orientación inicial y una posición inicial de cada una de una pluralidad de marcas de referencia con respecto a un punto de referencia, en donde la orientación inicial incluye una ubicación X, Y, Z y una elevación, un azimut y una orientación de balanceo de cada marca de referencia con respecto al origen de un marco de coordenadas de referencia;
cargar la orientación inicial y la posición inicial de cada una de la pluralidad de marcas de referencia en un dispositivo de grabación, en donde cada una de la pluralidad de marcas de referencia es un punto fiducial;
grabar una primera orientación…
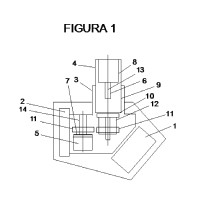
SENSOR LÁSER CON MECANISMO DE GIRO INTEGRADO.
(31/12/2014). Ver ilustración. Solicitante/s: UNIMETRIK, S.A. Inventor/es: DE LA MAZA URIARTE,Borja.
Sensor láser con mecanismo de giro integrado que comprende: una cámara ; un láser ; y un chasis configurado para girar sobre su propio eje ; que dispone de un mecanismo de giro indexado que comprende, a su vez: un conjunto motorizado , que consiste en un motor de giro situado en un eje paralelo al eje de giro , y conectado con dicho eje de giro a través de un engranaje ; y un conjunto motorizado que consiste en un motor de enclavamiento alojado en el interior del eje en un soporte ; y donde el soporte comprende inferiormente unos cilindros de enclavamiento y un husillo acoplado a dicho soporte de tal forma que el enclavamiento se produce por contacto de unas esferas alojadas en el chasis y los cilindros adosados en el inferior del soporte.
Procedimiento para la caracterización de firmes en carreteras.
(15/10/2014) La presente invención describe un procedimiento para la obtención de modo semiautomático, del espesor puntual, promedio y el volumen de cada uno de los firmes que conforman una carretera de nueva construcción. Comprende un sistema LiDAR móvil, responsable de la captura de los datos de las capas de firmes, un sistema de referencia que permite el registro de dichas capas y un programa que realiza el cálculo de los espesores puntuales, promedio y volúmenes asociados.
Procedimiento y dispositivo de medición y posicionamiento de objetos.
(09/07/2014) Procedimiento de medición y posicionamiento de un objeto en forma de cubo, de paralelepípedo rectángulo, de cilindro o de prisma recto, cuya superficie de base es un polígono regular que tiene un número par de lados, en el que las dimensiones del objeto son determinadas y en el que, después de la determinación de la longitud o de la anchura del objeto , este objeto es girado con ayuda de un plato rotativo para determinar respectivamente su anchura o su longitud,
caracterizado por que este procedimiento presenta las etapas siguientes:
- etapa 1: colocación del objeto por su superficie de base sobre un plato rotativo ,
- etapa 2: determinación de la longitud o de la anchura de la…
Dispositivo móvil para la realización de modelos tridimensionales de espacios interiores.
(13/12/2013) La presente invención se refiere a un dispositivo móvil para mapeado geométrico de edificios, que utiliza dos odómetros para la obtención de datos de trayectoria, fundamentalmente distancia recorrida y giros, y un láser escáner para la obtención de geometría en coordenadas polares. Debido a la sincronización existente entre los datos de trayectoria y los datos de coordenadas polares, se puede obtener un modelo geométrico tridimensional. El sistema posee un microcontrolador para la gestión de los datos de los odómetros y una batería para la alimentación de todos los sistemas.
SISTEMA DE DETECCIÓN ÓPTICA DE POSICIÓN 3D CON CÁMARA ÚNICA.
(03/04/2012) Se describe un sistema mediante el que resulte posible detectar la posición 3D de uno o varios objetos posicionados en el interior de un volumen de control correspondiente a una zona espacial predeterminada, con la utilización de una única cámara de visualización. El sistema incluye dicha cámara sustentada por una plataforma de soporte que incorpora además al menos un medio reflector mediante el que se refleja a hacia la cámara la luz emitida por elementos emisores de luz asociados a uno o más puntos de un objeto situado en dicho volumen de control y cuya posición se desea detectar, estando este volumen de control determinado…
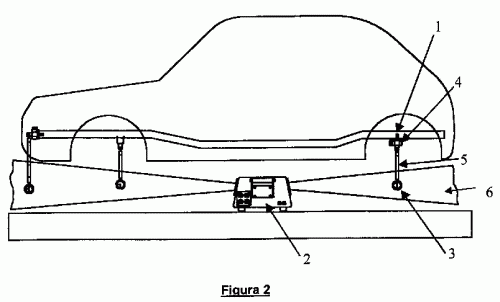
SISTEMA OPTICO DE MEDIDA DE CHASIS DE VEHICULOS.
(01/04/2003). Ver ilustración. Solicitante/s: UNIVERSIDAD DE ZARAGOZA.. Inventor/es: AGUILAR MARTIN,JUAN JOSE, LOPEZ DOMINGO,MIGUEL ANGEL.
El sistema óptico de medida de chasis de vehículos permite medir cotas geométricas de vehículo a partir de puntos característicos del bastidor, mediante visión estereoscópica móvil. El sistema consta de un instrumento de medida , de varias dianas de medición y elementos auxiliares como enganches y alargadores . El instrumento de medición es una estructura alargada rígida y ligera. Incluye dos cámaras de video en sus extremos, solidarias a un foco y movidas por motores que les confieren un grado de libertad giratorio. En cada punto a medir se cuelga una diana de forma que se posicione dentro del campo de visión del instrumento. Para ello se utiliza un enganche y unos alargadores. El instrumento medirá la posición espacial del centro de las dianas reflectantes, con lo que calculará la posición espacial de los puntos del bastidor y posteriormente las cotas del vehículo.
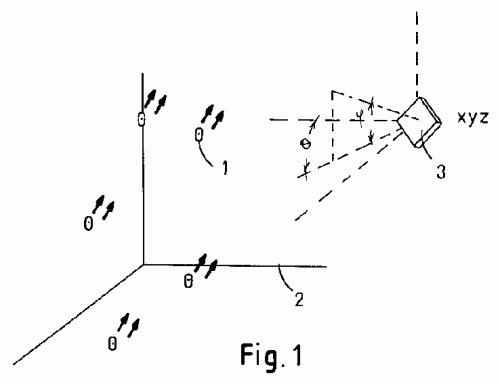
(16/04/1999) SISTEMA FOTORRECEPTOR CONSTITUIDO AL MENOS POR TRES FOTOSENSORES NO PARALELOS ENTRE SI, ILUMINADOS POR UN FOTOEMISOR QUE PERMITE, MEDIANTE UN DISPOSITIVO ELECTRONICO ADECUADO, LA DETERMINACION DE LA INTENSIDAD Y DIRECCION DE LA RADIACION INCIDENTE. LA INTEGRACION SOBRE UN SUBSTRATO SEMICONDUCTOR DE FOTORRECEPTORES CONSTITUYENDO MICROPIRAMIDES CUYAS CARAS HOMOLOGAS SEAN PARALELAS Y ESTEN CONECTADAS ELECTRICAMENTE, CONSTITUYE UNA FORMA DE REALIZACION DE UNA SUPERFICIE FOTOSENSORA DE CARACTER VECTORIAL INTEGRADA EN UN MICROSISTEMA CAPAZ DE DETERMINAR LA INTENSIDAD Y DIRECCION DE LLEGADA DE LA RADIACION PROCEDENTE DEL FOTOEMISOR. UNA APLICACION PERMITE EL POSICIONAMIENTO AUTOMATICO DEL PUNTERO DEL MONITOR DE UN ORDENADOR MEDIANTE LA ORIENTACION DE LA CABEZA DEL UTILIZADOR, LO QUE CONSTITUYE…
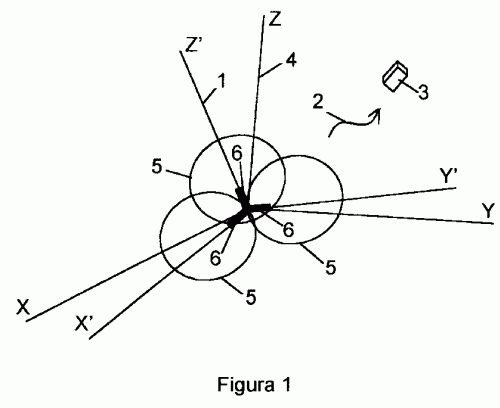
SENSOR INFRARROJO DE POSICIONAMIENTO ANGULAR.
(16/02/1999). Ver ilustración. Solicitante/s: INFRARROJO Y MICROELECTRONICA S.L. Inventor/es: RUIZ SANCHEZ, MANUEL, BOREL, CEDRIC.
SENSOR INFRARROJO DE POSICIONAMIENTO ANGULAR. SENSOR INFRARROJO DE POSICIONAMIENTO ANGULAR CARACTERIZADO POR PERMITIR DETERMINAR EL POSICIONAMIENTO ANGULAR DE UN CUERPO PARTIENDO DE TRES FOTOEMISORES SOLIDARIOS AL CUERPO , CON SUS EJES OPTICOS PREFERENTEMENTE ORTOGONALES ENTRE SI Y LEY DE EMISION EN COSENO, TOMANDO COMO REFERENCIA UN TRIEDRO EN CUYO PRIMER OCTANTE SE ENCUENTRA UN FOTORRECEPTOR ILUMINADO POR LOS FOTOEMISORES QUE TRANSFORMA LAS SEÑALES OPTICAS RECIBIDAS EN UNA SEÑAL ELECTRICA QUE, ACONDICIONADA MEDIANTE UNA UNIDAD DE TRATAMIENTO DE SEÑAL, PERMITE A LA UNIDAD DE COMPUTO DEL SISTEMA OBTENER LOS DATOS DE ORIENTACION EN EL ESPACIO DEL CUERPO RESPECTO AL TRIEDRO DE REFERENCIA . TIENE SU PRINCIPAL CAMPO DE APLICACION COMO DISPOSITIVO DE ENTRADA EN INTERFACES HOMBRE-MAQUINA, EN LA OBSERVACION DE LA CONDUCTA EN LA CONDUCCION DE AUTOMOVILES, EN EL ACCESO DE PERSONAS DISCAPACITADAS (TETRAPLEJICOS) A LOS SISTEMAS DE INFORMACION Y CONTROL DE DISPOSITIVOS.
SENSOR DE POSICION Y ORIENTACION ANGULAR PARA LA OBSERVACION DE LA CONDUCTA, DETECCION DEL SUEÑO Y PERDIDA DE LA ATENCION DURANTE LA CONDUCCION DE VEHICULOS.
(16/02/1998). Ver ilustración. Solicitante/s: INFRARROJO Y MICROELECTRONICA S.L. IRTA. Inventor/es: RUIZ SANCHEZ, MANUEL, SANCHEZ RODRIGUEZ, ROSA, PASTOR PUEBLA, LUIS.
SENSOR DE POSICION Y ORIENTACION ANGULAR PARA LA OBSERVACION DE LA CONDUCTA, DETECCION DEL SUEÑO Y PERDIDA DE LA ATENCION DURANTE LA CONDUCCION DE VEHICULOS. CONSISTE EN LA DETECCION DE ANOMALIAS EN LA CONDUCCION A PARTIR DE LOS DATOS DE POSICION Y ORIENTACION ANGULAR DE LA CABEZA DEL CONDUCTOR _Y DE LOS DATOS DE VELOCIDAD DEL VEHICULO, REVOLUCIONES DEL MOTORY POSICION DEL VOLANTE_ DETERMINAEDOS MEDIANTE CINCO PUNTOS DE REFERENCIA CONSTITUIDOS POR CINCO EMISORES DE INFRARROJO SOLIDARIOS AL VEHICULO Y DE UN FOTORRECEPTOR SOLIDARIO A LAS GAFAS DEL CONDUCTOR. A PARTIR DE LAS SEÑALES RECIBIDAS SE EFECTUAN LOS CALCULOS PARA GENERAR RECOMENDACIONES AUDIOVISUALES O _EN CASOS EXTREMOS_ UN FRENADO DE EMERGENCIA AUTOGUIADO; LOS DATOS RELEVANTES DE CONDUCCION DE UN INTERVALO DE TIEMPO INMEDIATAMENTE ANTERIOR SON GRABADOS EN MEMORIA NO VOLATIL CUYO DISPOSITIVO DE ESCRITURA SE INHIBE DE FORMA IRREVERSIBLE AL DETECTARSE UN CHOQUE, PRESERVANDOSE LA INFORMACION.
APARATO Y METODO PARA GENERAR SEÑALES PARA EMPLEO EN LA DETERMINACION DE LAS COORDINADAS POSICIONES DE UN LUGAR DADO QUE TIENE COORDENADAS POSICIONALES DESCONOCIDAS.
(16/02/1977). Solicitante/s: DYNELL ELECTRONICS CORPORATION.
Resumen no disponible.
{kind=link}
{kind=link}
{kind=link}
{kind=link}