CIP-2021 : B63H 25/04 : de funcionamiento automático, p. ej. sujetos a la brújula.
CIP-2021 › B › B63 › B63H › B63H 25/00 › B63H 25/04[2] › de funcionamiento automático, p. ej. sujetos a la brújula.
Notas[t] desde B60 hasta B66: TRANSPORTES O MANUTENCION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS.
B63H PROPULSION O GOBIERNO MARINO (propulsión de vehículos de colchón de aire B60V 1/14; especialmente adaptados para submarinos que no sean de propulsión nuclear, B63G; especialmente adaptados para torpedos F42B 19/00).
B63H 25/00 Gobierno; Disminución de marcha utilizando medios distintos a los elementos propulsores (que emplean unidades de propulsión fueraborda instaladas de forma amovible B63H 20/00 ); Anclaje o amarre dinámico, es decir, posicionamiento de los buques por medio de elementos propulsores auxiliares o principales.
B63H 25/04 · · de funcionamiento automático, p. ej. sujetos a la brújula.
CIP2021: Invenciones publicadas en esta sección.
Velero autónomo para monitorización oceanográfica.
(21/02/2019). Solicitante/s: Autonomous Marine Systems, Inc. Inventor/es: HOLEMANS,WALTER.
Un velero , que comprende:
- una serie de cascos dispuestos en paralelo entre sí y acoplados juntos mediante una disposición de celosía ,
- una estructura de vela rígida que es giratoria alrededor de un primer eje de rotación que es ortogonal a un plano de los cascos y un segundo eje de rotación que es paralelo a los cascos , y
- un sistema de auto-adrizamiento que está configurado para hacer girar la estructura de vela rígida alrededor del segundo eje de rotación cuando se detecta un vuelco del velero.
PDF original: ES-2701242_T3.pdf
Disposición para averiguar una fuerza que actúa sobre un timón.
(06/12/2017) Sistema de posicionamiento dinámico para el posicionamiento automático de un vehículo acuático, en particular un barco, con un timón , en particular un timón de suspensión total, con un medio de ajuste , en particular un aparato de gobierno para ajustar el timón y una unidad de accionamiento , en particular una hélice de accionamiento, que comprende un dispositivo de control para el direccionamiento del medio de ajuste y/o de la unidad de accionamiento , medios para averiguar datos de posición de vehículo acuático que están configurados para transferir los datos de posicionamiento de vehículo acuático al dispositivo de control , y al menos un dispositivo de medición para averiguar datos de medición de magnitudes físicas que actúan sobre el vehículo acuático, estando configurado el al menos un dispositivo de medición para transferir…
Método para la operación de un buque oceánico no tripulado.
(26/10/2016) Método para conducir un buque oceánico no tripulado , donde el buque comprende un casco , una vela de ala autosujeta para propulsión, una quilla para estabilidad de la dirección, y un timón ,
caracterizado por los pasos:
- ajustar el timón y la vela para que el recipiente mantenga una dirección estable con respecto al viento en una desviación del timón dada,
a) - para verificar la posición del buque con la ayuda de un sistema de conducción electrónico a bordo, y si está registrado que el buque no se acerca más a su destino,
b) - ajustar el timón para establecer un nuevo, curso arbitrario, donde el curso se selecciona entre un numero de cambios de curso…
Disposición para averiguar una fuerza que actúa en un timón.
(20/04/2016). Solicitante/s: BECKER MARINE SYSTEMS GMBH & CO. KG. Inventor/es: LEHMANN, DIRK.
Disposición para averiguar fuerzas que actúan en un timón , en particular timón de suspensión total, para vehículos acuáticos, en particular barcos, que comprende una unidad de cálculo, al menos un dispositivo de medición para averiguar valores de una magnitud física de un timón, y medios para transferir los valores averiguados de la magnitud física a la unidad de cálculo, en la que la unidad de cálculo está configurada para determinar las fuerzas que actúan en el timón sobre la base de los valores averiguados de la magnitud física, caracterizada por que el al menos un dispositivo de medición está dispuesto en el timón , siendo las fuerzas que actúan en el timón la fuerza ascensional y la fuerza de resistencia, y siendo la magnitud física del timón una tensión de flexión y/o un momento de torsión.
PDF original: ES-2577602_T3.pdf
Procedimiento y dispositivo flotante autónomo de servocontrol de posición de una embarcación náutica.
(08/04/2015) Dispositivo flotante autónomo de servocontrol de posición de una embarcación móvil , caracterizado por que comprende:
- un medio de determinación de posición geográfica,
- un órgano de propulsión
- una fuente de energía para alimentar el órgano de propulsión,
- un medio de orientación de la fuerza ejercida por el órgano de propulsión,
- un medio de fijación de un cabo a la citada embarcación,
- un medio de selección de una zona geográfica y
- medios de control del órgano de propulsión y del medio de orientación, adaptados, en función de la posición geográfica del dispositivo para mantener el dispositivo en la citada…
Control de un barco propulsado por chorro de agua.
(12/02/2014) Procedimiento para corregir el efecto negativo de una alteración sobre los datos de rumbo proporcionados por un sensor de rumbo de una embarcación, que comprende:
medir una cantidad de error de medición inducido por el efecto de por lo menos una alteración sobre por lo menos uno de entre datos de rumbo x, y, y z de un sensor de rumbo;
adquirir por lo menos uno de entre datos de rumbo x, y, y z del sensor de rumbo;
determinar si está produciéndose dicha por lo menos una alteración;
corregir los datos de rumbo al producirse la alteración añadiendo un valor de corrección a los datos de rumbo que compensa la cantidad medida de error de medición inducido por la alteración;
producir…
Procedimiento para compensar las alteraciones de una brújula magnética en una embarcación.
(18/06/2013) Procedimiento para compensar las alteraciones de un sensor de rumbo magnético de una embarcación, quecomprende:
reducir el efecto de la interferencia del campo electromagnético del equipo eléctrico de la embarcación sobre laprecisión de una señal de rumbo procedente del sensor magnético, cambiando un uso de la señal de rumbobasándose en por lo menos un modo de función de la embarcación y una posición de un aparato de control delmovimiento de un barco mediante por lo menos uno de entre: compensar la interferencia del campo y adquirir laseñal de rumbo únicamente cuando la interferencia electromagnética es suficientemente baja para evitar unaimprecisión sustantiva de los datos de rumbo.
Control de un barco propulsado por chorro de agua.
(18/06/2013) Procedimiento para controlar una embarcación que presenta un dispositivo de propulsión trasero y un propulsor,que comprende:
iniciar un movimiento lateral de la embarcación acoplando el dispositivo de propulsión trasero, al tiempo que seretrasa el acoplamiento del propulsor;
acoplar el propulsor tras un primer retardo de tiempo predeterminado para ayudar al movimiento lateral de laembarcación después de que una popa de la embarcación haya adquirido una cantidad de movimiento lateral apartir del dispositivo de propulsión trasero, basándose el primer retardo de tiempo predeterminado en lascaracterísticas de funcionamiento de la embarcación para minimizar la guiñada de la embarcación durante elmovimiento lateral.
Control de un barco propulsado por chorro de agua.
(18/06/2013) Procedimiento para calcular el rumbo de una embarcación, que comprende:
adquirir un rumbo 5 de la embarcación en un instante de base;
adquirir una velocidad de viraje de rumbo a partir de una velocidad angular de un sensor de viraje de laembarcación en un instante posterior;
determinar si el rumbo adquirido es considerado preciso en el instante posterior;
si el rumbo adquirido es considerado impreciso, calcular un rumbo de la embarcación basado en la velocidad deviraje de rumbo y el rumbo originalmente adquirido;
transmitir el rumbo calculado para el control del rumbo de la embarcación.
Control de un barco propulsado por chorro de agua.
(12/06/2013) Procedimiento para controlar una embarcación que presenta un dispositivo de propulsión trasero y un propulsor,que comprende:
durante por lo menos uno de entre el inicio y el cese del movimiento lateral de la embarcación mediante elacoplamiento/desacoplamiento del propulsor, posicionar previamente un ángulo del dispositivo de propulsióntrasero para proporcionar una fuerza lateral que minimice la guiñada del barco antes de que se produzca un errorde rumbo, el ángulo posicionado previamente basado en las características de funcionamiento de laembarcación.
CONTROL DE UN BARCO PROPULSADO POR CHORRO DE AGUA.
(27/12/2011) Procedimiento para controlar el rumbo de una embarcación, que comprende: adquirir un rumbo deseado de la embarcación; adquirir un rumbo real de la embarcación en el momento T0; calcular un error de rumbo comparando el rumbo deseado con el rumbo real; determinar una tasa de cambio del error de rumbo: determinar ganancias de algoritmo utilizadas para controlar al menos una de entre la cantidad y la tasa de una desviación de una tobera de la embarcación para su utilización en mantener el rumbo de la embarcación; determinar un valor para una señal de control de tobera teniendo en cuenta cada ganancia de algoritmo determinada; determinar una cantidad de desviación para una tobera de la embarcación,…
ARQUITECTURA DE POSICIONAMIENTO DINÁMICO.
(28/06/2011) Una arquitectura que comprende: un sistema de navegación inercial ; y un sistema de posicionamiento dinámico para un buque que incorpora un medio para la combinación de unos datos suministrados por al menos uno de una pluralidad de equipamientos de medición de la posición y de unos datos suministrados por el sistema de navegación inercial para deducir una estimación de la posición o de la velocidad del buque; un conjunto de conmutadores ; y un controlador del conjunto de conmutadores; en la que el conjunto de conmutadores puede ser accionado bajo el control del controlador del conjunto de conmutadores para suministrar los datos suministrados por al menos…
PERFECCIONAMIENTOS EN LAS DISPOSICIONES DE TIMON AUTOMATICO PARA EMBARCACIONES DE VELA.
(16/08/1977). Solicitante/s: EGUI JULIA,JOSE.
Resumen no disponible.
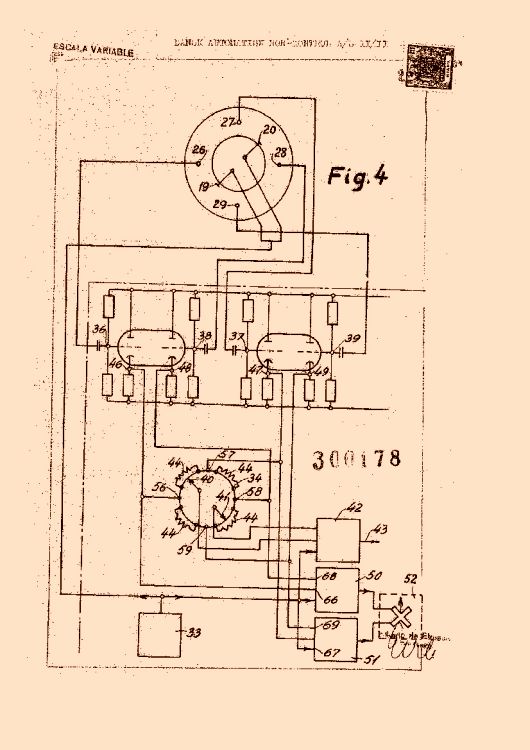
UNA INSTALACIÓN AUTOMÁTICA DE GOBIERNO PARA BUQUES.
(01/12/1964). Ver ilustración. Solicitante/s: DANSK AUTOMATISK ROR - KONTROL, A/S.
Resumen no disponible.
{kind=link}