CIP-2021 : G01C 25/00 : Fabricación, calibrado, limpieza o reparación de los instrumentos o dispositivos mencionados en los otros grupos de esta subclase (ensayo,
calibrado o compensación de brújulas G01C 17/38).
CIP-2021 › G › G01 › G01C › G01C 25/00[m] › Fabricación, calibrado, limpieza o reparación de los instrumentos o dispositivos mencionados en los otros grupos de esta subclase (ensayo, calibrado o compensación de brújulas G01C 17/38).
CIP2021: Invenciones publicadas en esta sección.
Procedimiento y dispositivo para determinar parámetros de medición inerciales.
(06/05/2020) Procedimiento para determinar los parámetros de medición inerciales mediante una unidad de medición inercial que presenta sensores inerciales , donde al menos dos sensores inerciales detectan cada uno el mismo parámetro de medición a detectar en los intervalos de medición que se superponen al menos parcialmente entre sí de forma independiente con diferente precisión de detección,
caracterizado porque los parámetros de medición inerciales están previstos para controlar un misil, y un valor de salida (A) corregido (A) para controlar el misil se forma (S7) a partir de los valores de los parámetros de medición detectados (S1, S2) en función de la precisión de detección de al menos un sensor inercial , donde
- un desplazamiento (d1) de un primer sensor inercial y un desplazamiento…
Dispositivo y procedimiento de mantenimiento de actitud de un portador que utiliza girómetros.
(18/03/2020) Dispositivo de mantenimiento de actitud de un portador, comprendiendo el dispositivo:
· tres girómetros primarios dispuestos para medir velocidades de rotación primarias (Rbc) de un portador alrededor de tres ejes primarios,
· un girómetro secundario dispuesto para medir una velocidad de rotación secundaria (Rhp) del portador alrededor de un eje secundario diferente de cada uno de los ejes primarios,
· una cámara que presenta un eje óptico diferente de cada uno de los ejes primarios,
· un módulo de tratamiento de datos configurado para
• estimar errores de factor de escala y de deriva que contaminan las velocidades de rotación primarias (Rbc),…
Compensación de sesgo electrónica para un giroscopio.
(08/01/2020) Metodo para compensar el sesgo de un giroscopio vibratorio de Coriolis que tiene una unidad de control, un armazon y un elemento unido al armazon mediante un sistema de resortes que restringe el movimiento del elemento al interior de un plano formado por un primer eje y un segundo eje , en el que la unidad de control esta dispuesta para mover el elemento de manera lineal en una direccion a lo largo de un eje de accionamiento, comprendiendo el metodo:
generar medidas de sesgo en una direccion a lo largo de un eje de deteccion para una pluralidad de angulos de accionamiento usando el giroscopio vibratorio de Coriolis, en el que cada angulo de accionamiento en la pluralidad de angulos de accionamiento es el angulo del eje de accionamiento con respecto…
Procedimiento de gestión automática de un girómetro longitudinal montado en un aparato volador.
(20/11/2019). Solicitante/s: MBDA FRANCE. Inventor/es: DE PICCIOTTO,FRANÇOIS.
Procedimiento de gestión automática de un girómetro longitudinal que está montado sobre un misil aéreo, susceptible de ser puesto en rotación, procedimiento según el cual, durante la utilización del girómetro longitudinal se controla automáticamente al citado misil de tal manera que se le pone en rotación alrededor de su eje longitudinal , alternando el sentido de la rotación, y esto de una manera regular, siendo cambiado el sentido de rotación a cada vuelta con el fin de anular el efecto del factor de escala del citado girómetro longitudinal , además de corregir las derivas, cuya corrección se obtiene mediante la puesta en rotación del misil.
PDF original: ES-2764104_T3.pdf
Corrección de datos del sensor inercial.
(06/11/2019) Un método para corregir errores en los datos de velocidad emitidos por sensores inerciales indicativos de una velocidad de cambio en la orientación en el espacio inercial de un objeto al que están unidos los sensores inerciales, teniendo el objeto también un sistema de seguimiento no inercial dispuesto para determinar la orientación del objeto referenciado a un marco de referencia de una plataforma móvil con la que está asociado el objeto, comprendiendo el método los pasos:
(i) recibir datos de velocidad emitidos por los sensores inerciales;
(ii) recibir datos de orientación del sistema de seguimiento no inercial;
(iii) recibir datos de orientación indicativos de la orientación de la plataforma móvil en el espacio inercial;
(iv) derivar datos de velocidad de una combinación sincronizada…
Procedimiento y sistema de armonización de un marco de referencia de un posicionador angular con respecto a un marco de referencia terrestre.
(06/11/2019) Procedimiento de armonización con respecto a un marco de referencia terrestre de un marco de referencia de un posicionador angular apto para recibir un móvil o un artefacto volante, embarcando dicho posicionador angular un dispositivo de medida de informaciones inerciales de dicho móvil o artefacto volante, siendo los ejes del posicionador angular y del dispositivo de medida de informaciones inerciales paralelos, o confundidos, o teniendo entre ellos una o varias distancias angulares conocidas, comprendiendo el procedimiento:
- una etapa de obtención (E20), a partir de informaciones inerciales medidas (E10) por el dispositivo de medida durante un primer período…
Procedimiento, sistema y programa informático para determinar la orientación de un aparato.
(11/09/2019) Un procedimiento para determinar la orientación, relativa a un vehículo, de un aparato fijado al vehículo, comprendiendo el procedimiento:
registrar periódicamente datos de aceleración del aparato a lo largo de tres ejes mutuamente ortogonales en un primer intervalo de tiempo;
registrar periódicamente datos de velocidad y rumbo del aparato en un segundo intervalo de tiempo;
determinar un primer vector que corresponde a la dirección de gravedad usando los datos de aceleración;
identificar uno o más períodos de aceleración en una línea sustancialmente recta utilizando los datos de velocidad y rumbo;
seleccionar datos de aceleración correspondientes al uno o más períodos…
Transmisión simultánea de datos utilizando varios parámetros desde el mismo sensor.
(25/04/2019) Un procedimiento que comprende:
recibir, en un optimizador de sensor, una primera solicitud desde un procesador de datos de sensores desde un primer elemento sensor, la primera solicitud de datos de sensores que identifica un primer conjunto de parámetros de flujo de datos;
recibir, en el optimizador de sensor, una segunda solicitud de datos de sensores del primer elemento sensor, la segunda solicitud que identifica un segundo conjunto de parámetros de flujo de datos que son diferentes del primer conjunto de parámetros de flujo de datos;
solicitar, mediante el optimizador de sensor, un flujo de datos de origen desde el primer elemento del sensor, utilizando un conjunto de parámetros de origen basado en el primer conjunto de parámetros de flujo de datos y el segundo conjunto de…
De-saturación de giroscopio de control de movimiento en aeronaves.
(10/04/2019). Solicitante/s: THE BOEING COMPANY. Inventor/es: HEIBERG,CHRISTOPHER JAN.
Un método para ajustar una matriz de giroscopios de control de movimiento a bordo de una nave espacial, una aeronave o embarcación que comprende:
recibir un flujo de aire o de líquido; y
dirigir la corriente a lo largo de al menos un canal de tal manera que el empuje se vectoriza a la matriz de giroscopios de control de movimiento para ajustar el impulso en la matriz de giroscopios de control de movimiento.
PDF original: ES-2733933_T3.pdf
Procedimiento de verificación de posición automatizada.
(12/03/2019) Un procedimiento de verificación automatizada de la posición de un sensor con respecto a un generador de vapor de una planta de energía nuclear durante un procedimiento de evaluación efectuado utilizando el sensor sobre el generador de vapor, en el que un ordenador desplaza de forma robótica el sensor a través de la pluralidad de tubos del generador de vapor, comprendiendo la pluralidad de tubos una pluralidad de tubos de Emplazamientos Identificados de manera Exclusiva (UIL) para cada uno de los cuales una señal histórica es almacenada, comprendiendo el procedimiento;
detectar una señal procedente del sensor ;
efectuar una determinación de…
Unidad de medición inercial de aeronave no tripulada.
(21/12/2018) Una unidad de medición de inercia para una aeronave no tripulada, que comprende un conjunto de alojamiento, un conjunto de detección y un amortiguador de vibraciones, estando el conjunto de detección y el amortiguador de vibraciones dispuestos en el conjunto de alojamiento, en donde:
el amortiguador de vibraciones comprende un primer cojín de atenuación de vibraciones para amortiguar vibraciones; el conjunto de detección comprende una primera placa de circuito , una segunda placa de circuito y una línea de señal flexible para conectar de forma comunicativa la primera placa de circuito y la segunda placa de circuito , un sensor de inercia se dispone de forma fija sobre la segunda placa de circuito , y la primera placa de circuito se fija sobre el conjunto de alojamiento;
la unidad de medición de inercia…
Dispositivo y método para calibrar distanciómetros láser.
(30/11/2018). Solicitante/s: EQUIPOS NUCLEARES, S.A., S.M.E. Inventor/es: MUÑOZ BUSTILLO,Angel, GOMEZ ESTEFANIA,Fernando, LIMA ALMEIDA,Domingo, MONTERO GARRIDO,Luis Oscar.
Dispositivo para calibrar distanciómetros láser, cuyo sistema de calibración comprende una placa de destino (Pd), un aparato patrón consiste en un seguidor láser (LT), entre los que se interpone el dispositivo , que comprende unos medios de fijación de un palpador esférico del seguidor láser (LT), del distanciómetro a calibrar y de una placa de referencia del distanciómetro a calibrar , y una superficie especular , enfrentada al seguidor láser (LT) y a su palpador , que está dispuesta justo a la mitad de la distancia existente entre la placa de referencia y el palpador y es perpendicular a la línea (Lb) que pasa por dicha placa y por dicho palpador , de tal forma que la distancia (D1) del punto de impacto (Pih) del haz del seguidor (HT) en la superficie especular sea igual a la distancia existente entre dicho punto (Pih) y el palpador esférico.
PDF original: ES-2692168_A1.pdf
PROCEDIMIENTO Y DISPOSITIVO PARA MEDICIÓN EN TIEMPO REAL MEDIANTE UN DISPOSITIVO INTELIGENTE.
(07/09/2018) Procedimiento que permite obtener con gran precisión mediciones sin importar la distancia entre el punto a medir y el dispositivo de medición, y que además son calculadas en tiempo real, realizado sobre un dispositivo inteligente que comprende dos cámara y y comprende las etapas de: Orientación externa de las cámaras y realizando tomas fotográficas a dianas de posición conocida dispuestas a diferentes distancias, obteniendo datos de la orientación: coordenadas de los centros de proyección (XC, YC, ZC) de cada cámara y los ángulos (¿, ¿, ¿) de cada cámara respecto de unos ejes de referencia (X, Y, Z). Almacenar los datos obtenidos de posición de los centros de proyección (XC, YC, ZC) y ángulos (¿, ¿, ¿) de cada cámara para cada posición calibrada. Realización de la medición…
Sistema y método para calibrar una unidad de medición inercial.
(14/02/2018) Un aparato de calibración para calibrar una unidad de medición inercial, IMU , que presenta un eje de medición y que produce una salida representativa de una orientación del eje de medición, comprendiendo el aparato de calibración:
un buje rotacional configurado para hacer girar la IMU en torno a un primer eje de rotación, y caracterizado por:
un buje de elevación configurado para hacer girar la IMU en torno un segundo eje de rotación perpendicular al primer eje de rotación, siendo la orientación del eje de medición relativa al primer eje controlable por la rotación de la IMU en torno al segundo eje; y
un sistema de control configurado en combinación con el buje rotacional…
SISTEMA DE RASTREO DE OBJETOS ANIMADOS O INANIMADOS EN TIEMPO REAL CON AUTOREFERENCIACIÓN, AUTOCALIBRACIÓN Y SINCRONIZACIÓN ROBUSTA.
(28/09/2017). Solicitante/s: INSTITUTO TECNOLÓGICO METROPOLITANO. Inventor/es: BOTERO VALENCIA,Juan Sebastian.
La presente solicitud divulga un sistema de rastreo de objetos animados o inanimados en tiempo real, caracterizado porque comprende un sistema de adquisición de medidas inerciales y un sistema de calibración autónomo. La presente invención además incluye la calibración dinámica del sistema de adquisición de medidas inerciales con un sistema automático in-situ orientado al rastreo, mezcla de IMU's en sistemas no ortogonales para desarrollar un sistema auto referenciado. El sistema tiene aplicación en deportes acuáticos y donde sea necesaria la trasmisión de datos mecánicos, de objetos animados o inanimados, por lo que emplea sistemas robustos de transmisión y modelos de recopilación de datos que evitan la desincronización de la información y que incluyen un sistema de comunicación infrarrojo.
Método y dispositivo para diagnosticar un problema en una función de detección.
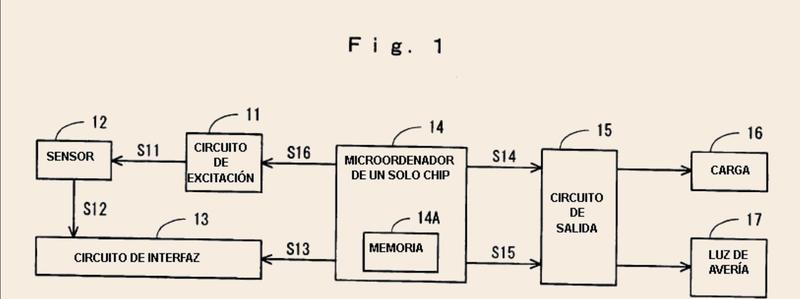
(23/12/2015). Ver ilustración. Solicitante/s: HONDA GIKEN KOGYO KABUSHIKI KAISHA. Inventor/es: OGAWA,SUMITAKA, TAKEUCHI, YOSHIAKI, NOMURA,SHIGEO, SAKAI,TOMOYUKI.
Un método de diagnosis de avería de una función de detección en un aparato para controlar una salida mediante el uso de un microordenador de un solo chip que recibe una señal eléctrica procedente de un sensor , para convertir una cantidad física en la señal eléctrica, en donde un circuito de excitación para excitar el sensor , es excitado por una señal de excitación emitida desde el microordenador de un solo chip; y el mencionado microordenador (14: 24) de un solo chip recibe una señal eléctrica, en la base del sensor durante el funcionamiento normal emitiendo dicha señal de excitación, caracterizado porque el mencionado microordenador de un solo chip recibe una señal eléctrica preliminarmente esperada del sensor variando la frecuencias de la señal de excitación, y se diagnostica una avería de la función de detección cuando no se recibe la señal eléctrica esperada durante la variación de la frecuencia de la señal de excitación.
PDF original: ES-2559407_T3.pdf
Electrónica digital en conjunto suspendido.
(12/08/2015) Un giroscopio de velocidad rotacional montado en un conjunto de base , estando el giroscopio de velocidad rotacional aislado de las vibraciones por medio de miembros de suspensión acoplados entre el giroscopio de velocidad rotacional y el conjunto de base , en donde el giroscopio de velocidad rotacional comprende:
- un miembro vibrante, y
- un sensor acoplado al miembro vibrante para detectar el movimiento del miembro vibrante en respuesta a la rotación del conjunto,
caracterizado porque el giroscopio de velocidad rotacional comprende además:
- electrónica digital acoplada al sensor para proporcionar datos…
Transmisor con auto-evaluación.
(05/03/2014) Sistema transmisor con auto-evaluación de control de procesos, comprendiendo dicho sistema:
un transmisor configurado para capturar datos de salida desde un sensor integral;
una memoria transmisora integralmente dispuesta con dicho transmisor, caracterizado por
estar dicha memoria transmisora configurada para almacenar una pluralidad de conjuntos de dichos datos de salida en la misma, incluyendo un conjunto de datos conforme al diseño inicial, y al menos un conjunto posterior de datos;
comprendiendo adicionalmente
un conjunto de datos conforme al diseño inicial, almacenados en dicha memoria transmisora;
un módulo de auto-evaluación integralmente dispuesto con dicho transmisor, en comunicación con dicha memoria transmisora y configurado para identificar una o más variaciones entre dicho conjunto de…
PATRÓN DIMENSIONAL PARA SISTEMAS LÁSER ESCÁNER Y FOTOGRAMÉTRICOS.
(26/06/2012) Patrón dimensional para sistemas laser y fotogramétricos.
Consiste en un objeto que permite verificar la precisión, exactitud y deriva de sistemas de medición basados en laser escáner y fotogramétricos por medio del cálculo de las distancias conocidas entre centros de las esferas ensambladas sobre un bloque . Sobre dicho bloque están también mecanizados cubos y cajeras de diferentes tamaños para obtener la resolución vertical y horizontal en la medición de salientes y hendiduras. Además, dispone de cajeras en la parte inferior para aligerar el peso de la estructura y anillas toroidales que favorecen el anclaje de las esferas al bloque.
(01/05/2003). Solicitante/s: ING. GUIDO SCHEYER SOLA-MESSWERKZEUGE, GESELLSCHAFT M.B.H. & CO. Inventor/es: HIRBURGER, WALTER, DR., SCHEYER, WOLFGANG, MAG.
Nivel de burbuja con un cuerpo del nivel de burbuja y por lo menos una unidad de burbuja dispuesta en su interior, caracterizado porque el cuerpo del nivel de burbuja es de un metal espumado.
PROCEDIMIENTO Y DISPOSICION PARA MARCAR UN RECIPIENTE DE PLASTICO PARA LIQUIDOS.
(16/10/2001). Ver ilustración. Solicitante/s: BAYERISCHE MASS-INDUSTRIE ARNO KELLER GMBH. Inventor/es: KELLER, HANS, OTT, GEORG.
PROCEDIMIENTO PARA MARCADO DE UN ENVASE DE PLASTICO TRANSPARENTE COMO NIVEL PARA APLICACION DE NIVEL DE BURBUJA, EN DONDE SE GENERA UNO O MULTIPLES MARCADOS A TRAVES DE RADIACION DE INCIDENCIA DE ENERGIA POR MEDIO DE ONDAS ELECTROMAGNETICAS, ESPECIALMENTE POR MEDIO DE RADIACION LASER EN, SOBRE Y/O DENTRO DE LA PARED DEL ENVASE PARA UNA BURBUJA DE GAS-NIVEL FLOTANTE. EL PLASTICO ESTA PROVISTO AL MENOS POR ZONAS CON PIGMENTOS . LA LONGITUD ( LA ) DE LAS ONDAS ELECTROMAGNETICAS Y/O LOS PARAMETROS DE MATERIAL, RESPECTIVAMENTE PROPIEDADES DE MATERIAL DEL PIGMENTO Y/O DEL PLASTICO SON ELEGIDAS DE TAL MODO, QUE LA CAPACIDAD PARA LA ABSORCION DE LA ENERGIA REGISTRADA A TRAVES DE LAS ONDAS ELECTROMAGNETICAS ALCANZA EN EL PLASTICO UN MINIMO Y EN EL PIGMENTO UN MAXIMO.
CALIBRACION AUTOMATICA DE PERCEPTORES REDUNDANTES.
(16/05/2000). Solicitante/s: HONEYWELL INC.. Inventor/es: KEYES, CHARLES, L., WEED, DOUGLAS, M.
UN SISTEMA PARA CALIBRAR LOS SENSORES DE UN SISTEMA SENSOR REDUNDANTE CALCULANDO PRIMERO UN CONJUNTO DE SEÑALES DE ERROR BASADAS EN DIFERENCIAS ENTRE UNA COMBINACION DE LAS SALIDAS Y VALORES CONOCIDOS Y CALCULANDO UN SEGUNDO CONJUNTO DE SEÑALES DE ERROR BASADAS EN DIFERENCIAS ENTRE LA PARIDAD ENTRE SENSORES PRESELECCIONADOS Y UN VALOR PREDETERMINADO Y CALCULANDO, A PARTIR DEL PRIMER Y SEGUNDO CONJUNTO DE SEÑALES DE ERROR, UNA PLURALIDAD DE SEÑALES DE CALIBRACION PARA AÑADIR A LA SALIDA DE LOS SENSORES INDIVIDUALES QUE ESTAN EN ERROR PARA CORREGIR SUS SALIDAS.
PROCEDIMIENTO Y DISPOSITIVO PARA ESTIMAR LOS SESGOS GIROMETRICOS.
(16/10/1999). Solicitante/s: AEROSPATIALE SOCIETE NATIONALE INDUSTRIELLE. Inventor/es: NACCACHE, FREDERIC.
LA PRESENTE INVENCION SE REFIERE A UN PROCEDIMIENTO Y A UN DISPOSITIVO PARA ESTIMAR LOS SESGOS GITOMETRICOS DE MEDICIONES EFECTUADAS POR GIROMETROS MONTADOS SOBRE UNA AERONAVE (A). SEGUN LA INVENCION: . SE INMOVILIZA DICHO AERONAVE (A) EN UN LUGAR DETERMINADO SOBRE LA TIERRA, DE LA CUAL SE MIDE LA LATITUD; . SE DETERMINAN LOS ANGULOS DE ASIENTO ({ZT}), DE ROLLIDO ({PH}) Y EL RUMBO DE DICHO AERONAVE (A); . SE CALCULA, A PARTIR DE LA LATITUD Y DE LOS ANGULOS DE ASIENTO ({ZT}), DE ROLLIDO ({PH}) Y DE RUMBO, LA VELOCIDAD DE ROTACION DE LA TIERRA; . SE MIDE LA VELOCIDAD DE ROTACION DE LA TIERRA; Y . SE EFECTUA LA SUSTRACCION ENTRE LAS VELOCIDADES CALCULADAS Y MEDIDAS, PARA OBTENER DICHOS SESGOS GIROMETRICOS.
NIVEL DE BURBUJA Y SU PROCESO DE FABRICACION.
(01/10/1996). Solicitante/s: SICFO-STANLEY SOCIETE INDUSTRIELLE ET COMMERCIALE FRANCAISE DES OUTILS STANLEY. Inventor/es: PROUTEAU, BERNARD.
EL NIVEL DE BURBUJA QUE COMPRENDE UN CUERPO SE COMPONE DE UN PERFIL PREFERENTEMENTE EN FORMA DE T O DE I CON UN ALOJAMIENTO EN EL QUE SE FIJA UN BLOQUE DE BURBUJA . SEGUN LA INVENCION EL CUERPO ESTA FABRICADO A PARTIR DE UNA RESINA TERMOENDURECIBLE Y EL BLOQUE DE BURBUJA ESTA INTEGRADO EN EL PERFIL.
APARATO PARA LA MEDICION DE LA VELOCIDAD DE GUIÑADA.
(16/03/1995). Solicitante/s: GROUP LOTUS LIMITED. Inventor/es: WILLIAMS, DAVID, ALLEN.
LA INVENCION PRESENTA UN APARATO PARA MEDIR EL GRADO DE DERRAPE DE UN VEHICULO EL CUAL CONSTA DE UN MEDIO PARA MEDIR LA VELOCIDAD DEL VEHICULO , UN MEDIO PARA MEDIR LA ACELERACION LATERAL DEL VEHICULO Y UN MEDIO PARA MEDIR EL ANGULO DE DIRECCION DEL VEHICULO , UN MEDIO DE CORRECCION Y UN PIROMETRO DE DERRAPE . EL MEDIO DE CORRECCION ACTUA PARA ELIMINAR LOS ERRORES DE POLARIZACION DE LA SALIDA DEL PIROMETRO DE DERRAPE . EL MEDIO DE CORRECCION ESTIMA LOS ERRORES DE POLARIZACION CUANDO LA VELOCIDAD DEL VEHICULO ES CERO (O DENTRO DE UNA TOLERANCIA CERO) O CUANDO TANTO EL ANGULO DE DIRECCION DEL VEHICULO ES CERO (O DENTRO DE UNA TOLERANCIA CERO) COMO LA ACELERACION LATERAL DEL VEHICULO ES CERO (O DENTRO DE UNA TOLERANCIA CERO).
SISTEMA PARA EL ALINEAMIENTO DE LA CENTRAL DE INERCIA DE UN VEHICULO LLEVADO SOBRE LA DE UN VEHICULO PORTADOR.
(01/09/1994). Solicitante/s: AEROSPATIALE SOCIETE NATIONALE INDUSTRIELLE. Inventor/es: GAIDE, PIERRE.
SISTEMA QUE PERMITE, POR EJEMPLO, LA INICIALIZACION DE LA CENTRAL DE INERCIA (CNM) DE UN MISIL A PARTIR DE LA CENTRAL DE INERCIA (CNP) DEL PORTADOR DE ESTE MISIL. -SEGUN LA INVENCION, SE PREVE UN DISPOSITIVO DE CONTROL (A) DE LA INFORMACION DE LA CENTRAL DE INERCIA DEL PORTADOR (CNP) EN LA CENTRAL DE INERCIA (CNM) DEL MISIL Y UN FILTRO DE KALMAN (K) MONTADO EN PARALELO SOBRE DICHO REVESTIMIENTO DE CONTROL (A) Y DESTINADO A IDENTIFICAR LOS ERRORES DE ARMONIZACION ENTRE LAS DOS CENTRALES DE INERCIA.
UN DISPOSITIVO Y UN METODO PARA DETECTAR UNA PLURALIDAD DE OBJETOS SITUADOS EN DIFERENTES EMPLAZAMIENTOS MEDIANTE ENERGIA ELECTROMAGNETICA.
(01/07/1985). Solicitante/s: HUGHES AIRCRAFT COMPANY.
DISPOSITIVO Y METODO PARA DETECTAR OBJETIVOS O BLANCOS.COMPRENDE UN COLIMADOR DE LENTE GRUESA QUE RECIBE ENERGIA DE UN TRANSMISOR PARA SU ENTRADA A TRAVES DE UNA FIBRA OPTICA. LA FIBRA TIENE UN REFLECTOR PARCIAL Y UN REFLECTOR TOTAL PARA SIMULAR EMPLAZAMIENTOS DE OBJETIVOS, Y LA ENERGIA REFLEJADA ES TRANSMITIDA HACIA ATRAS, A TRAVES DEL COLIMADOR, A UN RECEPTOR. LA REFLEXION PARCIAL DE ENERGIA ES PROPORCIONADA POR OTRO SITUADO SOBRE UNA SUPERFICIE DE UNO DE DOS TERMINALES DE FIBRA ALINEADOS Y SEPARADOS.
PROCEDIMIENTO PARA MEJORAR LA ADAPTACION AL CAMINO RECORRIDO DE TAXIMETROS ELECTRONICOS.
(16/03/1984). Solicitante/s: KIENZLE APPARATE GMBH.
PROCEDIMIENTO PARA MEJORAR LA ADAPTACION DE TAXIMETROS ELECTRONICOS AL CAMINO RECORRIDO.SE CARACTERIZA PORQUE NO ESTANDO COLOCADO EL PRECINTADO DEL APARATO, UN INTERRUPTOR ADOPTA UNA POSICION TAL QUE EL APARATO PUEDE SER CONMUTADO A UN ESTADO DE EXPERIMENTACION. MEDIANTE UNA PRIMERA TECLA EL EMISOR DE IMPULSOS RELACIONADOS CON EL CAMINO PUEDE SER UNIDO CON UN REGISTRO DE MANERA QUE LE ALIMENTEN IMPULSOS CORRESPONDIENTES AL CAMINO RECORRIDO. MEDIANTE ACCIONAMIENTO DE UNA SEGUNDA TECLA SE PUEDE DESCONECTAR EL EMISOR DE IMPULSOS, RETIRANDOSE DE LA MEMORIASIMULTANEAMENTE EL VALOR DE IMPULSOS ACUMULADO. AL COLOCAR EL PRECINTADO DEL APARATO SE SUPRIME EL ESTADO DE EXPERIMENTACION Y SE PUEDE CONECTAR DE NUEVO EL ESTADO DE FUNCIONAMIENTO.
{kind=link}
{kind=link}