CIP-2021 : B25J 3/04 : dotados de servomecanismos (cabezas servocontroladas en sí B25J 15/02).
CIP-2021 › B › B25 › B25J › B25J 3/00 › B25J 3/04[1] › dotados de servomecanismos (cabezas servocontroladas en sí B25J 15/02).
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 3/00 Manipuladores del tipo control dominado, es decir, manipuladores en los que la unidad de control y la unidad controlada ejecutan movimientos correspondientes en el espacio.
B25J 3/04 · dotados de servomecanismos (cabezas servocontroladas en sí B25J 15/02).
CIP2021: Invenciones publicadas en esta sección.
MÉTODO DE GUIADO DE DISPOSITIVOS ROBÓTICOS TELEOPERADOS PARA ALTERNAR MODO DE CONTROL EN POSICIÓN Y MODO DE CONTROL EN VELOCIDAD.
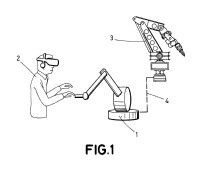
(02/08/2013) Método de guiado de dispositivos robóticos teleoperados para alternar modo de control en posición y modo de control en velocidad, que comprende la adaptación del dispositivo maestro dividiendo su zona de trabajo en región interna donde se implementa el modo de control en posición del robot esclavo , y región externa donde se implementa el modo de control en velocidad; utilización de una red de comunicaciones para transmitir órdenes de movimiento y fuerzas ejercidas por ambos dispositivos; adaptación del dispositivo maestro para que produzca efectos de vibración en las transiciones entre región interna y externa , indicando el cambio de un modo de control…
MÉTODO DE GUIADO DE DISPOSITIVOS ROBÓTICOS TELEOPERADOS.
(04/07/2013). Ver ilustración. Solicitante/s: UNIVERSIDAD POLITECNICA DE MADRID. Inventor/es: FERRE PEREZ,MANUEL, ARACIL SANTONJA, RAFAEL, BARRIO GRAGERA,Jorge, SUÁREZ RUIZ,Francisco Alejandro.
Método de guiado de dispositivos robóticos teleoperados para alternar modo de control en posición y modo de control en velocidad, que comprende la adaptación del dispositivo maestro dividiendo su zona de trabajo en región interna donde se implementa el modo de control en posición del robot esclavo , y región externa donde se implementa el modo de control en velocidad; utilización de una red de comunicaciones para transmitir órdenes de movimiento y fuerzas ejercidas por ambos dispositivos; adaptación del dispositivo maestro para que produzca efectos de vibración en las transiciones entre región interna y externa , indicando el cambio de un modo de control a otro. El cambio de un modo de control a otro se produce de forma que se garantiza el funcionamiento estable de los dispositivos y la máxima telepropriocepción para el operador.
SISTEMA DE CONTROL ANTI-COLISION PARA UN MANIPULADOR CONTROLABLE DE FORMA MULTI-AXIAL.
(01/05/1999) SE PRESENTA UN SISTEMA DE CONTROL LIBRE DE COLISIONES PARA UN MANIPULADOR MULTIAXIALMENTE CONTROLABLE , QUE COMPRENDE ESENCIALMENTE UNOS BRAZOS DE SOPORTE INTERCONECTADOS , QUE SE MUEVEN POR MEDIO DE ELEMENTOS DE DESPLAZAMIENTO CONTROLABLES DE MANERA QUE EL EXTREMO LIBRE DEL MANIPULADOR PUEDA POSICIONARSE ESPACIALMENTE Y PUEDA SER MOVIDO A DIFERENTES POSICIONES, Y TAMBIEN COMPRENDE UN MEDIO DE CONTROL PARA CONTROLAR LOS ELEMENTOS DE DESPLAZAMIENTO. EL MEDIO DE CONTROL COMPRENDE UN MODELO A ESCALA (1', 3') DEL MANIPULADOR Y DEL OBJETO A SER EXAMINADO O MANEJADO, AL MENOS EL MODELO A ESCALA (1') DEL MANIPULADOR ES MANUALMENTE ACCIONABLE Y ESTA EQUIPADO CON UNA SERIE DE DISPOSITIVOS DE GRABACION DE POSICION, QUE PUEDEN SUMINISTRAR SEÑALES DE CONTROL PARA…
UNOS PERFECCIONAMIENTOS EN LAS HERRAMIENTAS SERVOACCIONADAS, PARA EL APRIETE DE TUERCAS.
(16/07/1975). Solicitante/s: N-S-W CORP.
Resumen no disponible.
{kind=link}