CIP-2021 : G01S 17/87 : Combinaciones de sistemas que utilizan ondas electromagnéticas que no sean ondas de radio.
CIP-2021 › G › G01 › G01S › G01S 17/00 › G01S 17/87[1] › Combinaciones de sistemas que utilizan ondas electromagnéticas que no sean ondas de radio.
G FISICA.
G01 METROLOGIA; ENSAYOS.
G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS.
G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar.
G01S 17/87 · Combinaciones de sistemas que utilizan ondas electromagnéticas que no sean ondas de radio.
CIP2021: Invenciones publicadas en esta sección.
Procedimiento para determinar una disposición de al menos dos sensores y red de sensores.
(02/10/2019) Procedimiento para determinar una disposición de al menos dos sensores entre sí, en el que se detecta un objeto en movimiento por medio de al menos dos sensores y al menos una magnitud de movimiento del objeto en movimiento se determina por medio de cada vez uno de los sensores, en donde se recurre conjuntamente al menos a estas magnitudes de movimiento o respectivamente a magnitudes derivadas de ellas para determinar una disposición relativa de los sensores entre sí, caracterizado por que la al menos una magnitud de movimiento determinada por medio de cada vez uno de los sensores comprende al menos la velocidad del objeto en movimiento, al menos con respecto al sensor, y/o se determina…
Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor de un sensor situado en un vehículo y vehículo.
(11/02/2019) Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor como mínimo de un sensor instalado en un vehículo el cual capta objetos en el entorno del vehículo y sus datos de sensor describen puntos de objeto con una información de distancia, en donde a partir de los datos de sensor el dispositivo de procesamiento calcula objetos y sigue el movimiento de un objeto clasificado como vehículo , en donde el seguimiento del objeto se realiza mediante un modelo dinámico el cual utiliza una información de movimiento que describe el movimiento del objeto en dos direcciones de coordenadas, caracterizado por que al cumplirse un criterio de asignación utilizado a partir de una información de movimiento y/o de una información de geometría que describe la extensión geométrica del objeto, en el marco del modelo dinámico utiliza…
Manejo de carga por dispositivo de manejo de carga.
(30/01/2019) Un procedimiento para manejar una carga mediante un dispositivo de manejo de carga que comprende un medio de agarre para agarrar al menos un punto de sujeción de la carga, comprendiendo el procedimiento:
determinar, en el medio de agarre, un mapa de distancia que incluye una pluralidad de puntos asociados con la información de distancia, y dentro de la zona del mapa de distancias se describen una parte de la zona de la carga a la que se une el medio de agarre y/o en la que se apila otra carga, así como los alrededores de la carga;
caracterizado por
determinar una pluralidad de mapas de distancia que describen diferentes zonas de las cargas dentro de las que se localizan los puntos de sujeción o los puntos de apilamiento;
…
Rejilla luminosa de reflexión.
(31/01/2018) Rejilla luminosa de reflexion con varios emisores de luz (S1, S2, S3, S4t S5, S6) y varios receptores de luz (E1, E2, E3, E4, E5, E6) en una carcasa
y con un reflector retro-reflexivo opuesto, que retro-refleja rayos de luz entrantes paralelamente a su direccion de incidencia,
en el que el reflector retro-reflexivo (R) presenta al menos una primera seccion y presenta al menos una segunda seccion ,
en el que un primer emisor de luz (S1), un primer receptor de luz (E) y la primera seccion del reflector forman una barrera optica de reflexion y un segundo emisor de luz (S2), un segundo receptor de luz (E2)…
Procedimiento para ajustar varias zonas parciales de una zona de protección deseada.
(15/03/2017) Procedimiento para ajustar varias zonas parciales de una zona de protección deseada , en el que
a) se detectan las posiciones de una pluralidad de unidades de vigilancia , de forma preferida de escáneres láser, en donde cada unidad de vigilancia detecta una zona de detección ,
b) se determina un tamaño máximo de cada zona de detección ,
c) se fija la zona de protección deseada en una superficie de usuario gráfica ,
d) basándose en las posiciones de las unidades de vigilancia , el tamaño máximo de las zonas de detección y la zona de protección deseada se fijan mediante un software las zonas parciales a vigilar por las respectivas unidades de vigilancia…
Dispositivo de determinación de la velocidad del viento que incluye una pluralidad de fuentes láser.
(26/10/2016) Dispositivo de determinación de la velocidad del viento que incluye al menos dos fuentes láser que emiten haces coplanares en diferentes direcciones, a cada fuente láser estando asociados:
- unos medios de focalización del haz emitido,
- unos medios de recepción de un haz reflejado obtenido después de reflexión por una partícula presente en el aire del haz emitido correspondiente,
- unos medios de transmisión de una señal de interferencias que intervienen entre el haz emitido y el haz reflejado,
- unos medios de tratamiento de las señales de interferencias obtenidas,
incluyendo cada fuente láser una cavidad óptica en la que se reinyecta el haz reflejado para obtener una interferencia con el haz emitido,
caracterizado por que incluye cuatro fuentes láser que forman dos pares de fuentes,
…
Sistemas de guiado de atraque y de identificación de aeronaves.
(27/11/2015) Un sistema para determinar si un objeto detectado es un objeto conocido, teniendo el objeto conocido un perfil conocido y teniendo también una nariz con una altura de nariz conocida, comprendiendo el sistema:
medios de proyección configurados para proyectar pulsos de luz sobre el objeto detectado;
medios de recogida configurados para recoger pulsos de luz reflejados desde el objeto detectado y para detectar una forma de el objeto detectado de acuerdo con los pulsos de luz;
medios de comparación configurados para comparar la forma detectada con un perfil que corresponde a una forma conocida y para determinar si la forma detectada corresponde a la forma conocida; caracterizado por comprender adicionalmente
medios de identificación configurados para
- detectar una altura de nariz de el objeto detectado por medio de dichos medios de…
Sistemas de guiado de atraque y de identificación de aeronaves.
(22/10/2013) Un sistema para determinar si un objeto detectado es un objeto conocido, el objeto conocido teniendo un perfilconocido y teniendo también una característica conocida en una localización conocida, el sistema comprendiendo:
medios de proyección para proyectar pulsos de luz sobre el objeto detectado;medios de recogida para recoger pulsos de luz reflejados desde el objeto detectado y para detectar una formadel objeto detectado de acuerdo con los pulsos de luz;
medios de comparación para comparar la forma detectada con un perfil que corresponde a la forma conocida ypara determinar si la forma detectada corresponde a la forma conocida; y
medios de identificación para identificar si el objeto detectado es el objeto conocido determinando si el objetodetectado…
Sistemas de guiado de atraque y de identificación de aeronaves.
(22/10/2013) Un sistema para determinar el ángulo de guiñada (g) de un objeto detectado, el sistema comprendiendo:
medios de proyección para proyectar pulsos de luz sobre el objeto detectado;
medios de recogida para recoger pulsos de luz reflejados desde el objeto detectado y para detectar una formadel objeto detectado según los pulsos de luz; y
medios de determinación de ángulos para determinar el ángulo de guiñada (g) a partir de la forma detectada por losmedios de recogida ;
en el que el objeto detectado comprende una nariz que tiene una punta de la nariz y un lado izquierdo y un ladoderecho con relación a la punta de la nariz, y en el que los medios de determinación de ángulos determinan elángulo de guiñada (g) a partir de una porción de la forma la cual es adyacente…
Sistema de datos aéreos y métodos ópticos.
(28/08/2013) Un método para teledetección aérea, que comprende:
generar radiación láser con un láser sintonizable;
dividir la radiación láser en una componente proyectada y una componente de control;
convertir la componente de control en una o más señales de control electrónicas;
proyectar la componente proyectada en el aire para inducir radiación dispersada;
escanear la componente proyectada;
recibir una porción de la radiación dispersada como radiación retrodispersada;
convertir la radiación retrodispersada en una o más señales electrónicas de radiación retrodispersada,incluyendo convertir una porción de la radiación retrodispersada en una señal electrónica retrodispersadasin filtrar, filtrar al menos una porción de la radiación retrodispersada usando un filtro trampa óptico paraformar una porción filtrada, y convertir…
Sistemas de guiado de atraque y de identificación de aeronaves.
(08/05/2013) Un sistema para determinar si un vehículo está siguiendo una línea central, teniendo el vehículo una nariz y unarueda, comprendiendo el sistema:
un dispositivo de almacenamiento para almacenar (i) coordenadas que representan una trayectoria de la líneacentral y (ii) una distancia entre la nariz y la rueda,
un dispositivo de detección para detectar (i) una posición de la nariz y (ii) un ángulo de guiñada del vehículo, yun dispositivo de cálculo para calcular (i) una posición de la rueda, desde la posición de la nariz, el ángulo deguiñada detectado por el dispositivo de detección y la distancia almacenada en el dispositivo de almacenamiento, y(ii) un descentramiento de la rueda desde la línea central, a partir de las coordenadas almacenadas en el dispositivode almacenamiento y la posición de la rueda;
caracterizado…
Sistemas de guiado de atraque y de identificación de aeronaves.
(04/04/2013) Un sistema para determinar si una aeronave detectada es una aeronave conocida, teniendo la aeronave conocidaun perfil conocido y teniendo también características conocidas primera y segunda en localizaciones conocidas,comprendiendo el sistema:
medios de proyección para proyectar pulsos de luz sobre la aeronave detectada,medios de recogida para recoger pulsos de luz reflejados desde la aeronave detectada y para detectar unaforma de la aeronave detectada de acuerdo con los pulsos de luz,
medios de comparación para comparar la forma detectada con un perfil que corresponde a la forma conocida ypara determinar si la forma detectada corresponde a la forma conocida, y
medios de identificación para identificar si la aeronave detectada es la aeronave conocida determinando si laaeronave detectada…
Procedimiento para la determinación de distancia y la visualización, así como sistema de medición de distancia, en especial para la asistencia en la instalación de un puente.
(18/04/2012) Procedimiento para la instalación de un puente con la ayuda de un sistema de medición sobre un vehículo con las siguientes etapas de:
- determinación de la distancia (d1, d2) del terreno opuesto respecto al menos a dos escáneres láser (4a, 4b) que exploran en vertical y están colocados a una distancia definida entre sí en el vehículo,
- determinación de al menos dos ángulos (α, β) entre el contorno de terreno y un suelo , del que está separado el sistema de medición ,
- procesamiento de estos datos en una unidad de procesamiento y evaluación de datos para la
- determinación de un desplazamiento en altura (h') y/o un ángulo de inclinación (δ) entre el vehículo y el terreno opuesto ,
- determinación de una inclinación transversal respecto a la horizontal (h) a partir de un ángulo de torsión…
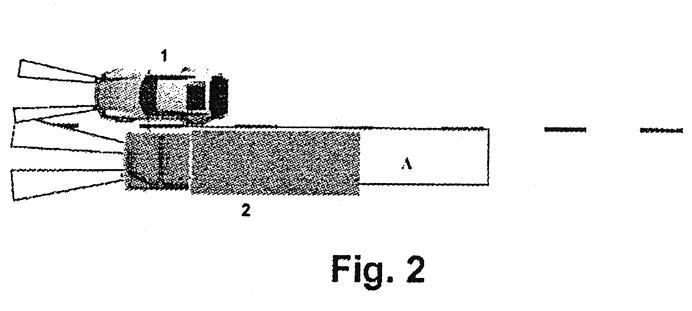
METODO Y SISTEMA PARA MEJORAR LA SUPERVISION DE UN AMBIENTE EXTERIOR DE UN VEHICULO AUTOMOVIL.
(16/11/2007). Ver ilustración. Solicitante/s: FICO MIRRORS S.A.. Inventor/es: DAURA LUNA, FRANCESC, SERVERA SERAPIO,LORENZO.
Método y sistema para mejorar la supervisión de un ambiente exterior de un vehículo automóvil.#El vehículo integra un sistema que detecta objetos susceptibles de colisionar, en una área de vigilancia (A), cubriendo un ángulo muerto, comprendiendo un dispositivo captador para adquirir unas imágenes representativas de uno o más objetos incluidos dentro de dicha área (A), y un sistema electrónico para procesado y análisis de unas señales de entrada. El método propone activar automáticamente una fuente de luz infrarroja hacia el área de vigilancia (A) en el caso de que las imágenes adquiridas no permitan un procesado y análisis que proporcione un resultado capaz de detectar fiablemente un objeto determinado , y desactivar, también automáticamente, dicha fuente de luz infrarroja cuando las imágenes adquiridas dan un resultado correcto sin necesidad de fuente de luz infrarroja. El sistema comprende un módulo con dicha fuente de luz infrarroja.
APARATO DE POSICIONAMIENTO SIN CONTACTO.
(16/10/2005) Un aparato sin contacto para posicionar un dispositivo de trabajo, prueba o inspección de una superficie con respecto a una superficie a trabajar, probar o inspeccionar en una posición y orientación deseadas con respecto a la misma, que incluye una placa de base situable a una cierta distancia fuera de superficie, medios para montar el dispositivo de trabajo, prueba o inspección de superficie sobre la placa de base, tres o más unidades de telémetros (6a, b, c) montadas en forma desmontable en una matriz separada (6d) sobre la placa de base, cada una de cuyas unidades incluye una fuente para la incidencia…
TRANSMISION DE DATOS DE INFORMACION DE MANIOBRA MEDIANTE UN MEDIDOR DE DISTANCIA.
(16/05/2004). Solicitante/s: IDM GMBH INFRAROT SENSOREN. Inventor/es: TIEDECKE, JOACHIM, VISSCHER, EGBERT, RONALD, IVO, CASIMIR.
Dispositivo para transmitir una información desde un medidor de distancia que funciona con una radiación electromagnética hasta un objeto que se encuentra a distancia, que refleja la radiación y cuya distancia ha de ser medida, estando la información impresa en la radiación y llevando asociado el objeto un receptor para la radiación, caracterizado porque el objeto es una grúa, cuyo control del motor de desplazamiento se ve influido por las informaciones y porque la información a transmitir por el medidor de distancia es una información de maniobra para el control del motor de desplazamiento de la grúa.
METODO PARA CALCULAR LA POSICION DE UN VEHICULO MOVIL DENTRO DE UNA ZONA LIMITADA Y DISPOSITIVO QUE COMPRENDE ESTE METODO.
(16/09/1999) UN METODO PARA DETERMINAR LA POSICION DE UN VEHICULO MOVIL DENTRO DE UN AREA LIMITADA, INCLUYE LA DISTRIBUCION DE PUNTOS DE REFERENCIA FIJOS A LO LARGO DEL PERIMETRO DE LA CITADA AREA, LA EXPLORACION DEL CITADO PERIMETRO POR EL CITADO VEHICULO, MEDIANTE UNA SEÑAL ELECTROMAGNETICA DIRECCIONAL, Y LA EMISION DE UNA SEÑAL DE IDENTIFICACION MUY CORTA POR LOS CITADOS PUNTOS DE REFERENCIA, EN RESPUESTA A LA DETECCION POR EL VEHICULO, SIENDO LA CITADA SEÑAL DECODIFICADA Y PROCESADA POR EL VEHICULO, JUNTAMENTE CON LOS DATOS SOBRE LA DIRECCION DE EMISION DE LA SEÑAL DE EXPLORACION. UN DISPOSITIVO QUE DE FORMA AL CITADO METODO ESTA CONSTITUIDO POR UN PRIMER ELEMENTO, INSTALADO SOBRE EL VEHICULO, INCLUYENDO…
SISTEMA PARA LA DETERMINACION DE LA POSICION DE UN OBJETO EN EL ESPACIO CON LA AYUDA DE UN SENSOR VIDEOOPTICO.
(16/11/1995). Solicitante/s: EDELHOFF POLYTECHNIK GMBH & CO.. Inventor/es: SCHULTE-HINSKEN, STEFANIE, DR., KIRCHHOF, JOHANNES.
EL SENSOR REGISTRA CARACTERISTICAS DEFINIDAS DEL OBJETO Y GENERA SEÑALES CORRESPONDIENTES A LA POSICION DE ESTAS CARACTERISTICAS. LAS SEÑALES SE PROCESAN EN UNA COMPUTADORA, CON PREFERENCIA PARA EL MANDO DE UNA INSTALACION DE MANIPULACION. EL OBJETO SE PROVEE DE AL MENOS TRES MARCAS REFLECTANTES, QUE FORMAN ENTRE SI UN ANGULO. LAS MARCAS SON ILUMINADAS POR UNA FUENTE DE LUZ . JUNTO A LA FUENTE DE LUZ SE DISPONE UNA CAMARA A MODO DE SENSOR (CAMARA CCD).
PROCESO Y DISPOSITIVO DE MEDICION DEL NIVEL DE ALARGAMIENTO SOPORTADO POR UN PRODUCTO EN UNA INSTALACION DE LAMINADO.
(16/06/1995). Solicitante/s: SOLLAC. Inventor/es: JEUNIAUX, FRANCOIS, MINEAU, JEAN-LUC.
LA INVENCION SE REFIERE A UN PROCESO Y A UN DISPOSITIVO DE MEDICION DEL NIVEL DE ALARGAMIENTO SOPORTADO POR UN PRODUCTO EN UNA INSTALACION DE LAMINADO , POR EJEMPLO DE UN PRODUCTO METALURGICO, EN EL QUE SE MIDE LA DIFERENCIA ENTRE LA VELOCIDAD (VE) DEL PRODUCTO POR ARRIBA Y LA VELOCIDAD (VS) DEL PRODUCTO POR DEBAJO DE LA INSTALACION DE LAMINADO, CARACTERIZADO EN QUE SE ILUMINA EN DOS PUNTOS DE IMPACTO SITUADOS RESPECTIVAMENTE POR ARRIBA Y POR DEBAJO DE LA INSTALACION DE LAMINADO POR UNA FUENTE UNICA O DOS FUENTES SINCRONAS Y COHERENTES DE LUZ MONOCROMATICA, EN QUE EN CADA PUNTO DE IMPACTO EL HAZ INCIDENTE ES ENVIADO SEGUN DOS DIRECCIONES SIMETRICAS, SIENDO RECOGIDOS LOS HACES REFLEJADOS SEGUN LO NORMAL A LA SUPERFICIE DEL PRODUCTO, EN QUE LOS HACES REFLEJADOS POR EL PRODUCTO ESTAN SUPERPUESTOS, Y EN QUE SE REALIZA UN ANALISIS FRECUENCIAL DE LA ONDA RESULTANTE DE ESTA SUPERPOSICION PARA MEDIR LA FRECUENCIA DE BATIDO.
METODO Y APARATO PARA LA NAVEGACION OPTICA POR LASER.
(16/07/1994). Solicitante/s: ARNEX HANDELSBOLAG. Inventor/es: OLSEN, BENGT OLOF.
DE ACUERDO CON UN METODO DE NAVEGACION OPTICA POR LASER Y HAZ DE LUZ GIRATORIO EN FORMA DE UN DISCO VERTICAL SE EMITE DESDE UNA UNIDAD SENSORA . LA LUZ REFLEJADA DE LOS REFLECTORES SE REGISTRA POR LA UNIDAD SENSORA Y SE PROCESA MEDIANTE UN COMPUTADOR PARA LA DETERMINACION DE LA POSICION. EN UN DISPOSITIVO DISEÑADO PARA IMPLEMENTAR EL METODO LA UNIDAD SENSORA COMPRENDE MEDIOS (6, 6A, 7) QUE ESTAN DISPUESTOS PARA EMITIR UN HAZ DE LUZ EN FORMA DE DISCO VERTICAL. EL DISPOSITIVO TAMBIEN COMPRENDE MEDIOS PARA MEDIR LA POSICION DEL ANGULO DE ELEVACION DEL DISPOSITIVO DE UN TRANSDUCTOR DE ANGULOS PARA DETERMINAR LA POSICION DEL ANGULO LATERAL. UN PRIMER COMPUTADOR EFECTUA UNA OPERACION DE ANALISIS DE IMAGEN Y UN SEGUNDO COMPUTADOR EJECUTA LOS CALCULOS DE DETERMINACION DE NAVEGACION SOBRE LA BASE DE LA INFORMACION RECIBIDA DEL PRIMER COMPUTADOR.
(01/05/1994). Solicitante/s: DEUTSCHE AEROSPACE AG. Inventor/es: SEPP, GUNTHER, DR.
EL INVENTO SE REFIERE A UN MEDIDOR DE ALTURA LASER (LHM) PARA MISILES PROFUNDOS A LOS QUE PARA RECONOCIMIENTO PERFECTO DE LA NIEBLA ARTIFICIAL SE LE HA ACOPLADO UN MEDIDOR DE DISTANCIA LASER CUYA DIRECCION DE RADIACION ESTA ENFOCADA TRANSVERSALMENTE HACIA DELANTE Y LOS VALORES DE MEDICION DE AMBOS APARATOS PROPORCIONAN UNA UNIDAD PARA LA ELABORACION INTELIGENTE DE SEÑALES QUE POR COMPARACION DE INTENSIDADES DE LOS VALORES DE MEDICION DE LOS MISMOS LUGARES DEL SUELO PROPORCIONAN LA EXTINCION DE LA NIEBLA Y CONSIDERANDO LA RELACION DEL ANGULO DE LA INTENSIDAD DE RETROCESO DE LA RADIACION LASER, CORRIGE LOS VALORES DE MEDICION DE ALTURA. SE DESCRIBEN EJEMPLOS DE CONSTRUCCION Y LAS FIGURAS DEL DISEÑO PROPORCIONAN MAS ACLARACIONES.
DISPOSITIVO DE MEDICION OPTICA.
(01/01/1994). Solicitante/s: THIEDIG, ULLRICH, DIPL.-ING. WENTE, HOLGER, DIPL.-ING. Inventor/es: THIEDIG, ULLRICH, DIPL.-ING., WENTE, HOLGER, DIPL.-ING.
EN UN DISPOSITIVO DE MEDICION OPTICO PARA LA DETERMINACION DE LA POSICION DE OBJETOS (32, 32') PUNTUALES DEPOSITADOS EN EL FONDO CONSISTIENDO EN UN CONVERTIDOR (2, 2') OPTO - ELECTRICO EXPLORANDO UN ENCUADRE CUYAS SEÑALES DE SALIDA SELECCIONADAS SE CONDUCEN A UN MECANISMO ANALIZADOR, SE CARACTERIZA A TRAVES DE UNA CONEXION DE DETECCION DE VALORES EXTREMOS (5, 6, 8, 26, 30, 8, 8') ENLAZADO CON LA SALIDA DE LOS CONVERTIDORES (2, 2') OPTO - ELECTRICOS QUE CONTROLA UN ACUMULADOR DE DATOS DE POSICION CORRESPONDIENTES A VALOR EXTREMO VERIFICADO.
{kind=link}